目标雷达截面建模
此示例显示如何模拟雷达目标随着越来越多的保真度。该示例介绍了雷达横截面(RCS)的概念,用于简单的点目标,并将其扩展到具有多个散射中心的更复杂的目标案例。它还讨论了如何随着时间的推移模拟RC的波动,并简要考虑极化信号的情况。
介绍
雷达系统依靠目标的反射或散射来探测和识别目标。目标反射越强,雷达接收端的回波就越大,从而导致更高的信噪比(SNR)和更有可能被检测到。在雷达系统中,目标反射的能量由雷达截面(RCS)决定,定义为

在哪里 代表RCS,
代表RCS, 是雷达和目标之间的距离,
是雷达和目标之间的距离, 信号的场强是否从目标处反射,和
信号的场强是否从目标处反射,和 为入射到目标上的信号场强。一般情况下,目标向各个方向散射能量,RCS是入射角、散射角和信号频率的函数。RCS取决于目标的形状和构建它的材料。RCS常用的单位包括平方米或dBsm。
为入射到目标上的信号场强。一般情况下,目标向各个方向散射能量,RCS是入射角、散射角和信号频率的函数。RCS取决于目标的形状和构建它的材料。RCS常用的单位包括平方米或dBsm。
本例着重于发射机和接收机在同一位置时的窄带单基地雷达系统。入射角和散射角相等,RCS仅是入射角的函数。这是背叛画的情况。对于窄带雷达,信号带宽比工作频率小,因此被认为是恒定的。
一个简单的点目标的RCS
最简单的目标模式是各向同性散射。各向同性散射体的一个例子是均匀的密度的金属球。在这种情况下,反射的能量是不依赖于入射角的。各向同性散射体经常可以作为一个更复杂的目标点的一阶近似是从雷达遥远。例如,行人可以通过用1平方米RCS各向同性散射体来近似。
C = 3E8;FC = 3E8;行人= phased.RadarTarget('veslrcs', 1“PropagationSpeed”c...'运行频率'fc)
行人=分阶段。雷达目标与属性:enable极化:假MeanRCSSource: '属性' MeanRCS: 1模型:'非波动'传播速度:300000000运行频率:300000000
在哪里c是传播速度和FC.是雷达系统的工作频率。然后可以计算来自单位输入信号的散射信号
x = 1;ped_echo =行人(x)
ped_echo = 3.5449
在哪里x是入射信号。入射和反射信号之间的关系可以表达为 在哪里
在哪里

 表示目标反射产生的无量纲增益。
表示目标反射产生的无量纲增益。 是与系统的工作频率对应的波长。
是与系统的工作频率对应的波长。
复杂目标的rcs
对于形状更复杂的目标,反射不再被认为在所有方向上都是相同的。RCS随入射角(也称为迎角)而变化。与方面相关的RCS模式可以像测量天线辐射模式一样进行测量或建模。这种测量或模型的结果是一个RCS值表,它是目标局部坐标系中的方位角和仰角的函数。
下面的示例首先计算圆柱形目标的RCS图案,半径为1米,高度为10米,作为方位角和高度角度的函数。

[cylrcs, az, el] = rcscylinder (1,1 10 c, fc);
因为圆柱体是围绕z轴对称的,所以方位角不相关。RCS值只随仰角变化。
helperTargetRCSPatternPlot (az, el, cylrcs);标题(圆柱体RCS图);

高程剪辑中的图案看起来像
情节(el pow2db (cylrcs));网格;轴紧;ylim([ - 30 30]);Xlabel(的高度角(度));ylabel (“RCS (dBsm)”);标题(圆柱体RCS模式);

然后,方面依赖的RCS模式可以导入到一个phased.BackscatterRadarTarget目的。
cylindricaltarget = phased.backscatterradartarget(“PropagationSpeed”c...'运行频率'足球俱乐部,'azimuthangles'阿兹,“ElevationAngles”,el,...'rcspattern'cylrcs)
cylindricalTarget =分阶段。BackscatterRadarTarget具有属性:enable极化:假方位角:[1x361双]仰角:[1x181双]rcsppattern: [181x361双]模型:“非波动”传播速度:300000000工作频率:300000000
最后,生成目标反射。假定三个相等的信号从目标在三个不同方面的角度反射。所述第一两个角具有相同的仰角,但具有不同的方位角。最后有来自前两个不同的仰角。
x = [1 1 1];%3单位信号Ang = [0 30 30;0 0 30];% 3的方向cyl_echo = cylindricalTarget (x, ang)
Cyl_echo = 88.8577 88.8577 1.3161
可以证明没有方位角依赖,因为前两个输出是相同的。
存在解析导出的RCS图的目标形状的数量很少。对于更复杂的形状和材料,计算电磁学方法,如矩量法(MoM),或有限元分析(FEM),可以用来准确预测RCS模式。[1]中有关于这些技术的更详细的讨论。属性的输入可以使用这些计算的输出phased.BackscatterRadarTargetSystem Object™以前在气缸示例中完成。
多散射体扩展目标的RCS
虽然计算电磁方法可以提供准确的RCS的预测,他们往往需要计算的显著量和不适合于实时仿真。用于描述一个复杂目标的另一种方法是将其建模为简单散射体的集合。复合靶的RCS图案然后可以从简单的散射体的RCS图案导出为[1]

在哪里为目标的RCS, RCS是什么
RCS是什么 th散射体,
th散射体, 相对相位是散射者。多散射器目标的行为类似于天线阵列。
相对相位是散射者。多散射器目标的行为类似于天线阵列。
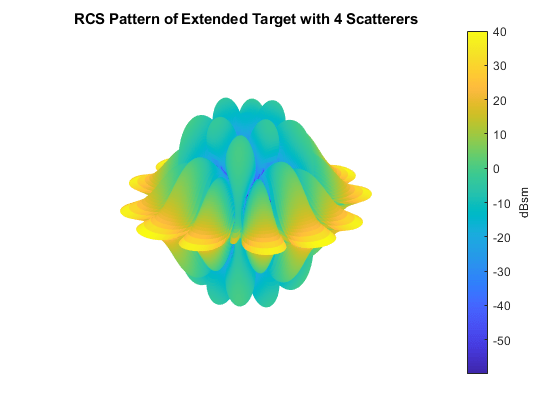
下一节显示如何建模由四个散射体组成的目标。散射体位于正方形的四个顶点。每个散射器是圆柱形点目标,如前一节中得出。不损失一般性,方块被放置在XY.飞机。这个正方形的边长是0.5米。

首先,定义散射体的位置。
scatpos = [-0.5 -0.5 0.5 0.5; 0.5 -0.5 0.5 -0.5, 0 0 0 0];
如果目标在发射机的远场,则每个分量散射体的入射角是相同的。然后,总RCS模式可计算为
Naz = Numel(AZ);nel = numel(el);Extrcs = Zeros(Nel,Naz);为了M = 1:nel sv = steervec(scatpos,[az;el(M)*ones(1,naz)]);% sv的平方是由于在单静态情况下的往返extrcs (m) = abs (sqrt (cylrcs (m,:))。*总和(sv。^ 2))^ 2;结尾
总的RCS模式是这样的
helperTargetRCSPatternPlot (az, el, extrcs);标题(“扩展目标的RCS模式有4个散射体”);
然后可以在a中使用这种模式phased.BackscatterRadarTarget对象来计算反射信号。结果表明,反射信号与方位角和仰角有关。
extendedTarget =分阶段。BackscatterRadarTarget (“PropagationSpeed”c...'运行频率'足球俱乐部,'azimuthangles'阿兹,“ElevationAngles”,el,...'rcspattern', extrcs);ext_echo = extendedTarget (x, ang)
ext_echo = 355.4306 236.7633 0.0000
多散射体扩展目标的宽带RCS
宽带雷达系统通常定义为具有其中心频率的5%的带宽。除了改进的范围分辨率之外,宽带系统还提供了改进的目标检测。宽带系统改善检测性能的一种方式是通过填充目标的RCS模式。这可以通过重新试图在前面部分中使用的4个圆柱形散射体组成的扩展目标来证明这一点。横跨各种目标方面的建模窄带RCS显示为
sweepaz = 90:90;方位扫过目标sweepel = 0;(elg,地理方位角)= meshgrid (sweepel sweepaz);sweepang =[地理方位角(:)”;elg(:)”);x = 1(1、大小(sweepang 2));%单元的信号释放(extendedTarget);extNarrowbandSweep = extendedTarget (x, sweepang);clf;情节(sweepaz pow2db (extNarrowbandSweep));网格在;轴紧;Xlabel('方位角(度)');ylabel (“RCS (dBsm)”);标题(['rcs模式在0 ^ o海拔',...“的扩展目标用4个散射体”]);

从扩展的目标模型中的多个圆柱体返回的一致性组合,创建40到50度之间的深度淡入。这些褪色会导致目标不被雷达传感器探测到。
接下来,将研究在相同中心频率下的宽带系统的RCS模式。该系统的带宽将被设置为中心频率的10%
bw = 0.10 *俱乐部;带宽大于中心频率的5%fs = 2 * bw;
建立了窄带扩展目标的宽带RCS模型。通常,RCS模型是使用仿真工具或距离测量离线生成的,然后提供给雷达工程师在其系统模型中使用。在这里,假设所提供的RCS模型在雷达中心频率的任意一侧以1MHz的间隔采样。
modelfreq =(-80e6:1E6:80E6)+ FC;[Modelcylrcs,Modelaz,modell] = Helpercylinderrcpattern(C,Modelfreq);
各散射中心的贡献模型如前所述。需要注意的是,这个近似假设目标的所有散射中心都在相同的距离分辨率范围内,对于这个例子是正确的。
nf = numel(modelfreq);Naz = Numel(Modelaz);nel = numel(uddel);ModelXtrcs = Zeros(Nel,Naz,NF);为了k = 1: nf为了m = 1时:NEL POS = scatpos * modelFreq(K)/ FC;SV = steervec(POS,[modelAz; modelEl(M)*一(1,NAZ)]);% sv的平方是由于在单静态情况下的往返modelXtrcs(m,:,k)= abs(sqrt(scomecylrcs(m,:,k))。*和(sv。^ 2))。^ 2;结尾结尾
现在使用刚刚计算的RCS模式生成了宽带RCS目标模型。
widebandExtendedTarget =分阶段。WidebandBackscatterRadarTarget (...“PropagationSpeed”c'运行频率'足球俱乐部,'采样率'fs,...'azimuthangles'modelAz,“ElevationAngles”modelEl,...“FrequencyVector”modelFreq,'rcspattern', modelExtRCS);
现在可以将建模的宽带RCS与窄带系统进行比较
extwideBandsweep = wideBandextendedTarget(x,sweepang);抓住在;情节(sweepaz pow2db (extWidebandSweep));抓住从;传奇('窄带','宽带');

目标的RCS模式现在有较浅的40到50度方位角零位。当信号以特定的频率和方位组合进行破坏性组合时,窄带模式中的深零值就会出现。宽带波形填补这些褪色,因为,虽然一些频率可能经历零为一个给定方面,大多数带宽不在零在那个方位角。
rcs的波动目标
到目前为止,讨论假定目标RCS值随着时间的推移是恒定的。这是非流动目标案例。实际上,因为雷达系统和目标都在移动,所以RCS值随时间而变化。这种情况是一个波动的目标。为了模拟波动的目标,彼得摇晃开发了四种统计模型,通过摇晃4表示晃动1,在实践中被广泛采用。抖动模型将波动的目标划分为两个概率分布和两个时间变化的行为,如下表所示:
慢速波动快速波动 ----------------------------------------------------------------- 指数Swerling 1 Swerling 2 4度卡方Swerling 3 Swerling 4
慢起伏目标的RCS停留期间保持不变,但是从扫描变化进行扫描。与此相反,对于快速波动目标RCS与驻留内的每个脉冲而变化。
转向1和2模型服从指数密度函数(pdf)给出
 ,
,
这些模型可用于模拟由相等强度散射体的集合组成的目标。
该史厄林3条4款服从4次的卡方PDF,由下式给出
 ,
,
当目标包含主导散射部件时,这些模型适用。在两个PDF定义中, 表示平均RCS值,这是非流动假设下的相同目标的RCS值。
表示平均RCS值,这是非流动假设下的相同目标的RCS值。
下一节示出了如何在从先前描述的圆柱形目标中产生雷达回波时应用抖动1统计模型。
cylindricaltargetswerling1 =...phased.BackscatterRadarTarget(“PropagationSpeed”c...'运行频率'足球俱乐部,'azimuthangles'阿兹,“ElevationAngles”,el,...'rcspattern'cylrcs,'模型',“Swerling1”)
cylindricalTargetSwerling1 =分阶段。BackscatterRadarTarget与属性:enable极化:假方位角:[1x361双]仰角:[1x181双]rcsppattern: [181x361双]模型:“转向”传播速度:300000000工作频率:300000000种子源:“自动”
在斯沃林1的情况下,反射不再是常数。RCS值随扫描的不同而不同。假设目标每次只被信号照亮一次,下面的代码模拟一个单位入射信号10000次扫描的反射信号功率。
n = 10000;tgt_echo =零(1,n);x = 1;为了m = 1时:N tgt_echo(M)= cylindricalTargetSwerling1(X,[0; 0],TRUE);结尾p_echo = tgt_echo。^ 2;%反射权力
绘制来自所有扫描的回报的直方图,并验证回报的分布符合理论预测。理论预测采用了以前推导的非波动RCS。对于圆柱目标,单位功率输入信号的法向入射反射信号功率为
p_n = cyl_echo (1) ^ 2;helperTargetRCSReturnHistogramPlot (p_echo p_n)

极化目标的RCS
目标RCS也是偏振的函数。要描述目标的极化特征,单一的RCS值已经不够了。相反,对于每个频率和入射角,使用散射矩阵来描述目标与入射信号的偏振分量的相互作用。本示例将不再深入讨论,因为该主题已在极化建模与分析的例子。
结论
这个例子简要介绍了雷达目标建模雷达系统仿真。它展示了如何点目标,目标与测量模式,并扩展目标建模。它也描述了如何生成目标回波时要统计的波动考虑在内。
参考
梅里尔·斯科尔尼克,《雷达手册》,第二版,第11章,麦格劳希尔出版社,1990年
[2] Bassem Mahafza,雷达系统分析和设计使用MATLAB,2。Chapman&Hall / CRC,2005
你也可以从以下列表中选择一个网站: