相控阵天线中的子阵列
此示例显示如何使用相控阵系统Toolbox™和执行分析,示出了模拟子阵列,通常用于现代相控阵系统。
介绍
与传统的碟形天线相比,相控阵天线具有许多优点。相控阵天线的元件更易于制造;整个系统遭受的组件故障更少;最重要的是,可以向不同方向进行电子扫描。
然而,这种灵活性并不是免费的。充分利用相控阵需要在每个单独的元件后面放置转向电路和T/R开关。对于需要数千或数万个元件的大型阵列的应用,这样做的成本太高,不实用。此外,在许多这样的应用中因此,在实践中,部署的系统通常使用折衷的方法。元素分组到子阵列中,然后子阵列形成整个阵列。元素仍然易于制造;整个阵列对于组件故障仍然具有鲁棒性;此外,T/R开关仅在每个子阵列处需要,因此显著降低了成本。
以下部分显示如何为两个特定应用程序模拟具有不同配置的子阵列网络:有限的视野(LFOV)阵列和宽带阵列。
有限视场(LFOV)阵列
LFOV阵列通常用于卫星应用。顾名思义,LFOV阵列只能在非常有限的窗口内扫描,通常小于10度。因此,可以使用子阵列,并且此类子阵列的间距可以远远大于波长的一半。
使用子阵列构造阵列的最简单方法是连续地铺设子阵列。以下代码段构造一个64元素Ula由八个8元素Ulas组成。在每个子阵列中,元素间隔为波长的一半。请注意,每个子阵列内没有导向性能力,因此阵列只能使用子阵列进行转向。
阵列几何图形如下图所示。

fc=3e8;c=3e8;天线=相位各向同性天线元件(“背靠背”,真);N=64;nsubaray=8;subula=phased.ULA(N/nsubaray,0.5*c/fc,“元素”,天线);replarray = phased.replationsubarray(“子阵列”,subula,...'gridsize',[1]
replarray=phased.ReplicatedSubarray,属性:Subarray:[1x1 phased.ULA]布局:“矩形”网格大小:[1 8]网格间距:“自动”子阵列方向:“无”
接下来,将该阵列的辐射图案与没有子阵列的64元uLa的辐射图谱进行比较。
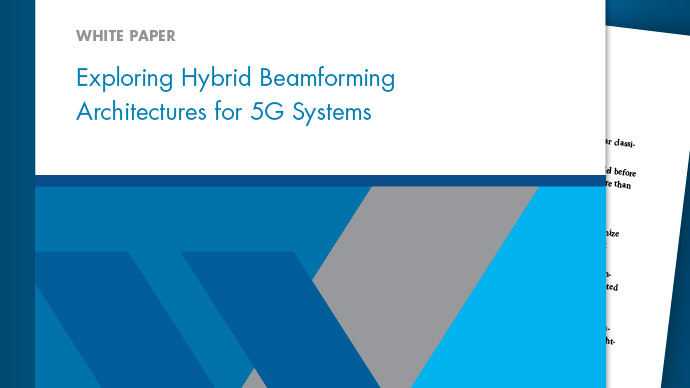
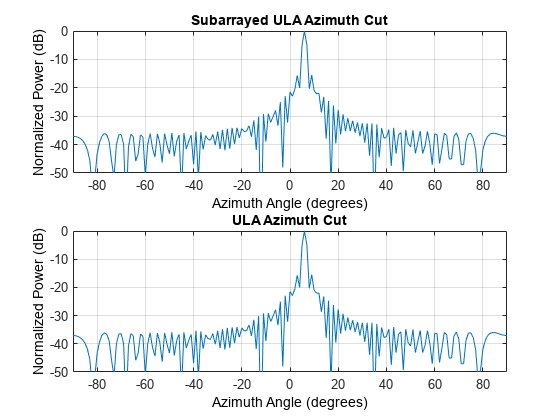
加油=分阶段加油(N,0.5*c/fc,“元素”,天线);子图(2,1,1),模式(replarray,Fc,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”,c);头衔(“子阵列ULA方位切割”);轴([ - 90 90-50 0]);子图(2,1,2),模式(REFUSA,FC,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”,c);头衔('ula方位角切');轴([ - 90 90-50 0]);
从图中可以清楚地看出,两个响应在宽边上是相同的。请注意,即使子阵列间隔很宽,响应中也没有光栅波瓣。
接下来,将阵列转向2度方位角。
斯泰朗=2;steeringvec_replarray=phased.SteeringVector('sensorarray',replarray,...“传播速度”,c);w=steeringvec_重新排列(fc,SteeringAng);steeringvec_加油=相控。SteeringVector('sensorarray',加油,...“传播速度”,C);韦特= steeringvec_refula(fc,梯亮);子图(2,1,1),模式(replarray,Fc,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,w);头衔(“子阵列ULA方位切割”);轴([ - 90 90-50 0]);子图(2,1,2),模式(REFUSA,FC,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,鹪鹩);头衔('ula方位角切');轴([ - 90 90-50 0]);
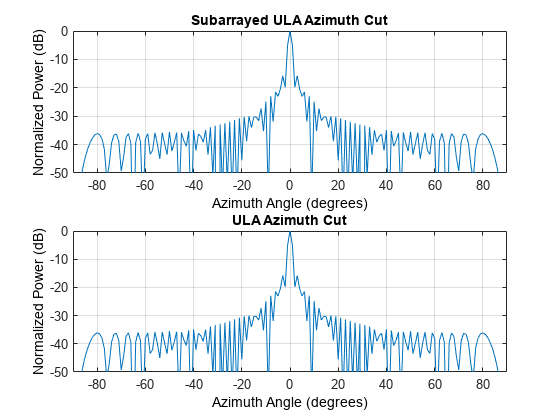
在这种情况下,参考阵列的响应仍然保持其原始形状,但子阵列ULA的情况并非如此。对于子阵列ULA,尽管主瓣方向正确,且远高于副瓣,但响应清楚地显示了通常所指的量化叶片.名称来自于转向处于子阵列的事实;因此,在子阵列级别量化每个元素的所需相移。当阵列进一步从宽边转向时,这种效果变得更糟。以下地图显示在将阵列转向6度的宽边后显示响应。
steerang=6;w=steeringvec_-replarray(fc,steerang);wref=steeringvec_-refula(fc,steerang);子批次(2,1,1),模式(replarray,fc,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,w);头衔(“子阵列ULA方位切割”);轴([ - 90 90-50 0]);子图(2,1,2),模式(REFUSA,FC,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,鹪鹩);头衔('ula方位角切');轴([ - 90 90-50 0]);
因此,当形成LFOV时,需要对使用连续子阵列进行谨慎的。
补偿量化波瓣的一种方法是在每个元素后面添加移相器。虽然这增加了成本,但与全自由度阵列相比,它仍然提供了很大的节约,因为T/R开关是最昂贵的部件,只需要在子阵列级别实现。如果在每个元素后面有移相器假设每个元件后面的移相器也被配置为将每个子阵列指向远离侧面6度的方向,则响应会变得更好,如下图所示。
释放(重新排列);重新排列。子阵列转向=“阶段”;replarray.PhaseShifterFrequency=fc;子批次(2,1,1);模式(replarray,fc,-180:180,0,'类型','powerdb',“重量”W...'坐标系',“矩形”,“传播速度”C“转向角”,6);头衔(“子阵列ULA方位切割”)轴([-90-50 0]);子批次(2,1,2);模式(燃料补给,燃料电池,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,鹪鹩);头衔('ula方位角切');轴([ - 90 90-50 0]);
作为侧面,元件和子阵列不一定转向相同的方向。在一些应用中,子阵列内的元件朝向特定方向转向。然后,子阵列可以转向稍微不同的方向以搜索附近。
宽带扫描阵列
虽然电子扫描阵列通常被称为分阶段阵列实际上,调整相位只是一种转向阵列的方法。相移器是本质上窄带装置,因此它们仅在窄带内工作,特别是对于大阵列。下图显示了当参考阵列是阶段转向30度的载波频率和3%以上的载波频率时的辐射图案。
转向器=[1 1.03]*fc;转向器=30;释放(转向器加油);wref=挤压(转向器加油(fc,转向器));子批次(2,1,1)模式(加油,转向器,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,鹪鹩);头衔('ula方位角切');轴([ - 90 90-50 0]);子图(2,1,2)模式(Refula,Fster,-180:180,0,'类型','powerdb',...'坐标系',“矩形”,“传播速度”C“重量”,鹪鹩);头衔(“ULA方位角切割,峰值缩放视图”);轴([25 35-5 0]);
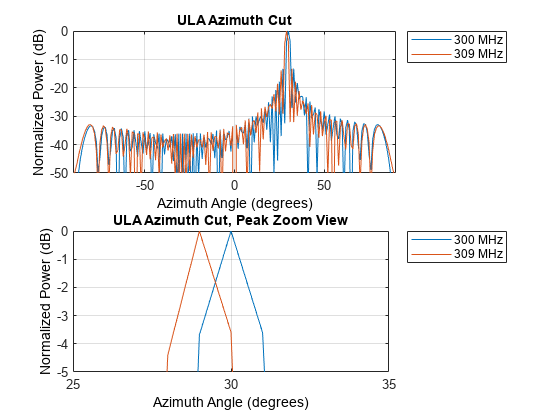
从图中可以明显看出,即使频率偏移仅为3%,峰值位置也会偏离所需方向。这称为斜视影响。因此,为了在宽带上实现转向,需要使用真正的时间延迟来转向。
实现真正延时的最常用方法是使用电缆。然而,在具有数千个元件的大阵列孔径中,实现潜在的巨大延时可能需要大量电缆。因此,这种方法不仅昂贵,而且繁琐。子阵列在准确性和可行性之间提供了折衷。总之,wi在每个子阵列中,转向是通过相位实现的;在子阵列中,转向是通过真实的时间延迟完成的。
构建这样一个数组的最简单方法是像前面几节一样,对子数组进行连续分组。
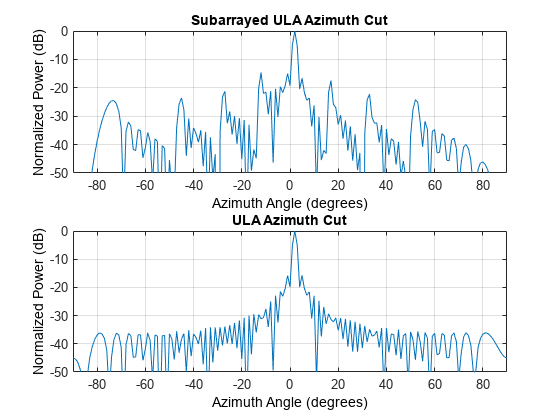
下面的图比较了子阵列ULA在三个频率下的辐射方向图。在子阵列级别,使用真实时间延迟将阵列转向30度方位角。同样,在每个子阵列中,元素也转向30度方位角。辐射方向图显示在载波频率处,比子阵列高10%载波频率,并且比载波频率高15%。
转向器=30;转向器=[1.1 1.15]*fc;释放(转向器重新排列);释放(转向器重新排列);w=挤压(转向器重新排列(转向器,转向器));wref=挤压(转向器重新排列(转向器,转向器));子批次(2,1,1)模式(重新排列,转向器,-180:180,0,'类型','powerdb',...“传播速度”C'坐标系',“矩形”,“重量”W...“转向角”,史泰朗);头衔(“子阵列ULA方位切割”);轴([ - 90 90-50 0]);子图(2,1,2)模式(replarray,fsteer,-180:180,0,'类型','powerdb',...“传播速度”C'坐标系',“矩形”,“重量”W...“转向角”,史泰朗);头衔(“子阵列ULA方位切割,峰值缩放视图”);轴([25 35-5 0]);
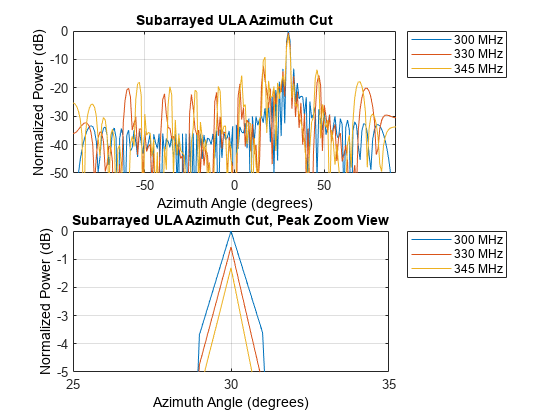
图中显示,斜视效应已被抑制,即使带宽比前一种情况宽得多。然而,与LFOV情况一样,如果所需带宽扩展到载波频率以上15%,则由于量化波瓣,辐射图案变得不理想。
解决此问题的一种方法是使用具有非周期子阵列的配置。此类配置的示例包括隔行子阵列、重叠子阵列,甚至随机子阵列。下一个示例显示隔行子阵列,其中子阵列的末端隔行且重叠。因为它不再由相同的子阵列构成,我们需要从一个大的阵列孔径开始,并对其进行分区,以实现这样的配置。
阵列几何图形如下图所示。

partarray =...阶段.PartitionedArray(“数组”,阶段性。ULA(N,0.5,“元素”,天线),...'子阵列',“阶段”);sel=0(NSUBRAY,N);Nsec=N/NSUBRAY;为了m=1:1巴雷如果m == 1 sel(m,(m-1)* nsec + 1:m * nsec + 1)= 1;eleesifm==nsubaray sel(m,(m-1)*Nsec:m*Nsec)=1;别的SEL(m,(m-1)* nsec:m * nsec + 1)= 1;结尾结尾partarray.SubraySelection=sel
partarray=phased.PartitionedArray,其属性为:阵列:[1x1 phased.ULA]子阵列选择:[8x64 double]子阵列方向:“相位”相移频率:300000000努帕相移位数:0
在下面的附图中可以看到所得到的辐射图案。
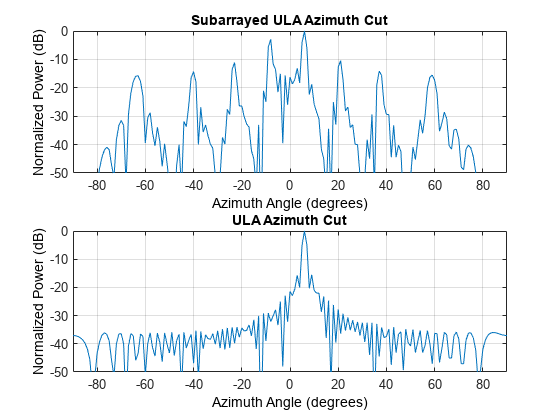
steeringvec_零件阵列=...相控矢量('sensorarray',partarray,“传播速度”,C);wwa =挤压(steeringvec_partarray(fteer,steerang));子图(2,1,1);模式(Partarray,Fsteer,-180:180,0,'类型','powerdb',...“传播速度”C'坐标系',“矩形”,“重量”,wwa,...“转向角”,史泰朗);头衔(“交错和重叠子阵列ULA方位切割”); 轴([-90-50 0]);子批次(2,1,2);模式(重新排列,fsteer,-180:180,0,'类型','powerdb',...“传播速度”C'坐标系',“矩形”,“重量”W...“转向角”,史泰朗);头衔(“连续子阵列ULA方位切割”);轴([ - 90 90-50 0]);
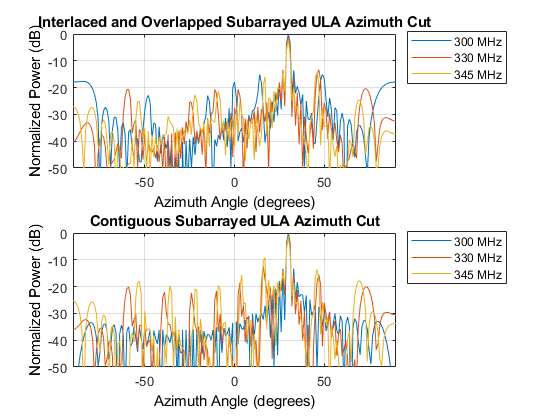
新的辐射图案抑制了最大量化瓣,实现了大约5dB的增益。通过设计更复杂的重叠的子阵列网络,可以实现更高的收益,但这在该示例的范围之外。
总结
该示例显示如何使用子阵列进行分阶段阵列,并在将子阵列技术应用于诸如LFOV阵列或宽带扫描阵列之类的应用时,示出了几个实际问题。
参考文献
[1] 罗伯特·梅洛,电子扫描阵列,摩根和克莱普,2007年。
您还可以从以下列表中选择网站: