重度Beamformer
样品矩阵反转(SMI)波束形成器
- 库:
相控阵系统工具箱/时空自适应处理
描述
的重度Beamformerblock使用样本时空协方差矩阵实现样本矩阵反演(SMI)空时自适应波束形成器。
港口
输入
输出
参数
指定PRF为—PRF值的来源
所有物(默认)|输入端口
PRF值的来源,指定为所有物或输入端口.当设置为所有物,脉冲重复频率(Hz)参数设置PRF。当设置为输入端口,使用脉冲重复频率输入端口。
脉冲重复频率(Hz)-脉冲重复频率
1(默认)|正标量
脉冲重复频率,PRF,指定为正标量。单位是赫兹。与any中的值保持一致波形模拟中使用的库块。
依赖关系
要启用此参数,请设置指定PRF为参数到所有物.
指定方向-指定目标方向的来源
所有物(默认)|输入端口
指定STAP处理器块的目标方向是来自块参数还是来自昂输入端口。取值范围为
所有物 |
这些参数仅在指定方向参数设置为 |
输入端口 |
使用 |
目标方向(度)-处理器瞄准方向
[0;0](默认)|实值长度-2列向量
处理器瞄准方向,指定为方位角和仰角的长度-2实值列向量,[方位角;仰角].方位角在-180°~ 180°之间,仰角在-90°~ 90°之间。单位是度。
依赖关系
要启用此参数,请设置指定方向来所有物.
指定目标多普勒为-目标多普勒源
所有物(默认)|输入端口
指定STAP处理器的目标多普勒值是否来自针对多普勒(赫兹)此块的参数或使用兴奋剂输入端口。对于ADPCA消除器和DPCA消除器块,指定目标多普勒为参数仅在输出pre-Doppler结果复选框被清除。取值范围为
所有物 |
使用目标多普勒块的参数目标多普勒参数仅在指定目标多普勒为被设置为所有物. |
输入端口 |
使用兴奋剂输入端口。此端口仅在指定目标多普勒为被设置为输入端口. |
针对多普勒(赫兹)-STAP处理器的目标多普勒
0(默认)|标量
STAP处理器的目标多普勒,指定为标量。
依赖关系
要启用此参数,请执行以下操作:重度Beamformer块,设置指定目标多普勒为来
所有物.要启用此参数,请执行以下操作:ADPCA消除器和DPCA消除器block, first clear the输出pre-Doppler结果复选框。然后设置指定目标多普勒为参数到
所有物.
保护单元的数量-用于训练的警卫单元数
2(默认值)|正偶数整数
用于训练的守卫单元数,指定为正的偶数整数。在可能的情况下,将保护单元平均划分为测试单元之前和之后的区域。
训练单元的数目-用于训练的单元数
2(默认值)|正偶数整数
用于训练的单元数,指定为正偶数。只要有可能,将训练单元集平均划分为测试单元之前和之后的区域。
输入模式坐标系统-自定义天线方向图坐标系
az-el(默认)|phi-theta
自定义天线方向图的坐标系,已指定az-el或phi-theta.当你指定az-el,可以使用方位角(度)和仰角(度)参数来指定模式点的坐标。当你指定phi-theta,可以使用φ角(度)和θ角(度)参数来指定模式点的坐标。
依赖关系
要启用此参数,请设置元素类型来定制天线.
φ角(度)-自定义天线辐射方向图的φ角坐标
0:360|实值1 -P行向量
指定天线辐射方向图的点的角度,指定为实值1-by-P行向量。P必须大于2。角的单位是度。角度必须在0°和360°之间,并且严格递增。
依赖关系
要启用此参数,请设置元素类型参数到定制天线和输入模式坐标系统参数到phi-theta.
θ角(度)-自定义天线辐射方向图的θ角坐标
0:180|实值1 -问行向量
指定天线辐射方向图的点的θ角,指定为实值1-x-问行向量。问必须大于2。角的单位是度。角度必须在0°和360°之间,并且严格递增。
依赖关系
要启用此参数,请设置元素类型参数到定制天线和输入模式坐标系统参数到phi-theta.
MatchArrayNormal-将天线单元旋转至阵列法线
在…上(默认)|关
选择此复选框可旋转天线单元图案使其与阵列法线对齐。当未被选中时,元素模式不会旋转。
当天线使用在天线阵和输入模式坐标系统参数为az-el,选中此复选框将旋转该模式,以便x-元素坐标系的轴沿阵列法线指向。不选择将使用不旋转的图元填充图案。
当天线用于天线阵和输入模式坐标系统被设置为phi-theta,选中此复选框将旋转该模式,以便z-元素坐标系的轴沿阵列法线指向。
将该参数与数组正常参数市建局和UCA数组。
依赖关系
要启用此参数,请设置元素类型来定制天线.
URA数组的维数,指定为正整数或正整数的1 × 2向量。
如果数组大小一个1 × 2的向量,这个向量有这个形式吗
[NumberOfArrayRows,NumberOfArrayColumns].如果数组大小为整数时,该数组具有相同的行数和列数。
当您设置指定传感器阵列为来
复制子数组,此参数适用于每个子阵列。
对于URA,数组元素沿着最左边的列从上到下索引,然后从左到右继续到下一列。在这个图中数组大小价值(3 2)创建一个包含三行两列的数组。

依赖关系
要启用此参数,请设置几何学来市建局.
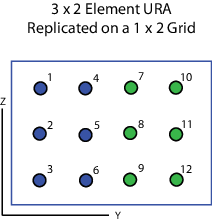
矩形子阵列网格大小,指定为单个正整数或1乘2的正整数行向量。
如果网格大小是整数标量,则数组在每行和每列中具有相同数目的子数组。如果网格大小是这种形式的1 × 2向量吗[NumberOfRows, NumberOfColumns],第一个条目是每列的子数组数。第二个条目是每行的子数组数。一行是沿本地列的y-轴,一列沿局部z设在。图中显示了如何使用a复制3 × 2的URA子数组网格大小属于[1,2].
依赖关系
要启用此参数,请设置传感器阵列来复制子数组和子阵列布局来矩形的.
模型的例子
您还可以从以下列表中选择网站: