规划雷达网络覆盖地形
这个例子展示了如何使用地形上的传播模型来规划雷达网络。在包含5个候选单站雷达站点的区域中导入DTED 1级地形数据。雷达方程用于确定目标位置是否可以被探测到,其中使用Longley-Rice传播模型或地形综合粗糙地球模型™(TIREM™)计算额外路径损失。最佳的三个地点被选择用于探测飞行在地面500米以上的目标。该场景被更新为模拟一个在地面以上250米飞行的目标。两种方案的雷达覆盖图都显示出来。
这个例子需要天线工具箱™和雷达工具箱。
导入地形数据
导入美国科罗拉多州博尔德周围地区的DTED格式地形数据。地形文件是从美国地质调查局(USGS)提供的“SRTM空隙填充”数据集下载的。该文件为DTED level-1格式,采样分辨率约为90米。单个DTED文件定义的区域在纬度和经度上都跨越1度。
dtedfile =“n39_w106_3arc_v2.dt1”;归因=“SRTM 3弧秒分辨率。数据可从美国地质调查局获得。”;addCustomTerrain (“南博尔德”dtedfile,...“归属”,归属)
使用导入的地形打开站点查看器。高分辨率卫星地图图像的可视化需要互联网连接。
查看器=站点查看器(“地形”,“南博尔德”);
展示候选雷达站点
该地区西面是山脉,东面是平坦的地区。雷达将被安置在平原地区以探测山区上空的目标。定义五个放置雷达的候选地点,并在地图上显示它们。候选地点的选择与地图上住宅区以外的当地高点相对应。
在每个位置创建并置的发射机和接收机站点,以模拟单基地雷达,其中雷达天线假定位于地面以上10米处。
名称=“雷达站点”+ (1:5);Rdrlats = [39.6055 39.6481 39.7015 39.7469 39.8856];rdrlon = [-105.1602 -105.1378 -105.1772 -105.2000 -105.2181];%创建与雷达相关的发射机站点rdrtxs = txsite (“名称”、名称、...“AntennaHeight”,10,...“人肉搜索”rdrlats,...“经”, rdrlons);%创建与雷达关联的接收器站点rdrrxs = rxsite (“名称”、名称、...“AntennaHeight”,10,...“人肉搜索”rdrlats,...“经”, rdrlons);%只显示雷达发射机的位置显示(rdrtxs);

缩放和旋转地图,以查看候选雷达站点周围的3d地形。选择站点查看位置、天线高度和地面标高。

单基地雷达系统设计
设计一个基本的单基地脉冲雷达系统,在距离雷达35000米,距离分辨率为5米的范围内,探测0.1平方米雷达截面(RCS)的非波动目标。期望的性能指标是检测概率(Pd)为0.9,虚警概率(Pfa)低于1e-6。雷达被假定是可旋转的,并且在所有方向上支持相同的天线增益,其中天线增益对应于一个高度定万博1manbetx向的天线阵列。
pd = 0.9;%检测概率pfa = 1 e-6;%虚警概率maxrange = 35000;最大无歧义范围(m)管理员= 5;所需距离分辨率(m)tgtrcs=.1;%所需目标雷达横截面(m^2)
使用脉冲积分降低雷达接收机所需的信噪比。使用10个脉冲并计算检测目标所需的信噪比。
numpulses = 10;Snrthreshold = albersheim(pd, pfa, num脉冲);%单位:分贝disp(snrthreshold);
4.9904
定义雷达中心频率和天线增益,假设天线阵列方向性很强。
fc = 10 e9;%发射机频率:10GHz平均增益=38;%天线增益:38dbc=物理常数(“光速”);λ= c / fc;
利用雷达方程计算雷达发射机所需的峰值脉冲功率(瓦)。
脉冲宽度=c/(2*量程);脉冲宽度=1/脉冲宽度;Ptx=radareqpow(λ,最大量程,snrthreshold,脉冲宽度,...“RCS”tgtrcs,“收益”,antgain);disp(Ptx)
3.1521e+05
确定目标位置
定义一个包含2500个位置的网格来表示感兴趣区域内移动目标的地理位置范围。该区域的纬度和经度均为0.5度,包括西部的山脉以及雷达场址周围的一些区域。目标是探测西部山区的目标。
定义感兴趣的区域Latlims = [39.5 40];Lonlims = [-105.6 -105.1];%定义感兴趣区域中目标位置的网格tgtlatv=linspace(latlims(1),latlims(2),50);tgtlonv=linspace(lonlims(1),lonlims(2),50);[tgtlons,tgtlats]=meshgrid(tgtlonv,tgtlatv);tgtlons=tgtlons(:);tgtlats=tgtlats(:);
计算目标位置的最小、最大和平均地面高程。
%创建与目标位置对应的临时站点数组并查询地形Z=标高(txsite)(“人肉搜索”,tgtlats,“经”tgtlons));[Zmin, Zmax] = bounds(Z);Zmean =意味着(Z);disp (地面高程(米):最小及最大平均+新线+...”“+圆形(Zmin)+”“+圆形(Zmax)+”“+圆(Zmean))
地面标高(米):最小最大平均1257 3953 2373
目标高度可以参照平均海平面或地面高度来确定。以地面高度为基准,确定目标高度为500米。
%目标地面高度(m)tgtalt = 500;
在地图上将感兴趣的区域显示为实心绿色区域。
查看器名称=“感兴趣的雷达覆盖区域”;regionData = propagationData (tgtlats tgtlons,“区域”,个(大小(tgtlats));等高线(区域数据,“ShowLegend”假的,“颜色”,“绿色”,“水平”, 0)

计算目标位置与地形的信噪比
雷达方程包括自由空间路径损耗,并具有附加损耗的参数。使用地形传播模型来预测地形上的额外路径损失。使用Alion Science的地形综合粗糙地球模型™(TIREM™)(如果有的话),或者使用Longley-Rice(又名ITM)模型。TIREM™支万博1manbetx持高达1000 GHz的频率,而Longley-Rice的有效频率高达20 GHz。计算总的附加损失,包括从雷达到目标的传播,然后从目标到接收器的传播。
使用TIREM或Longley-Rice创建一个地形传播模型tiremloc=tiremSetup;如果~isempty(tiremloc) pm = propagationModel(“泰勒姆”);其他的pm=传播模型(“朗利·赖斯”);结束%计算地形和雷达与目标之间的返回距离造成的额外路径损失[L,ds]=helperPathlossOverTerrain(pm、rdrtxs、rdrrxs、TGTLTS、tgtlons、tgtalt);
使用雷达方程计算每个雷达接收器处每个目标反射信号的信噪比。
计算所有雷达和目标的信噪比numtgts =元素个数(tgtlats);numrdrs =元素个数(rdrtxs);rawsnr = 0 (numtgts numrdrs);对于tgtind = 1: numtgts对于rdrind = 1:numrdrs rawsnr(tgtind,rdrind) = radareqsnr(lambda,ds(tgtind,rdrind),Ptx,pulsewidth,...“收益”antgain,“RCS”tgtrcs,“损失”L (tgtind rdrind));结束结束
优化雷达覆盖范围
如果雷达接收机SNR超过上面计算的SNR阈值,则检测目标。考虑雷达站点的所有组合,并选择产生最高检测次数的三个站点。计算SNR数据作为在所选雷达站点的接收机处可用的最佳SNR。
bestsitenums = helperOptimizeRadarSites(rawsnr, snrthreshold);信噪比= max (rawsnr (:, bestsitenums), [], 2);
显示雷达覆盖范围,显示信噪比满足检测目标所需阈值的区域。用红色标记显示为最佳覆盖选定的三个雷达站点。
覆盖图显示了与感兴趣区域界限相对应的北侧、东侧和南侧的直边。覆盖图假设雷达可以在所有方向上旋转并产生相同的天线增益,并且雷达可以同时发射和接收,因此没有最小覆盖范围。
覆盖地图在西部边缘有锯齿状的部分,覆盖区域受到地形影响的限制。在雷达系统设计范围(35000米)的限制范围内,西部边缘出现了平滑的部分。
用红色标记显示选定的雷达位置查看器名称=“雷达覆盖”;clearMap(观众)显示(rdrtxs (bestsitenums))图雷达覆盖范围rdrData=传播数据(TGTLAT、tgtlons、,“信噪比”信噪比);传奇标题=“信噪比”+新线+“(dB)”;轮廓(rdrData...“水平”,snrthreshold,...“颜色”,“绿色”,...“传奇标题”legendTitle)

改变要积分的脉冲数
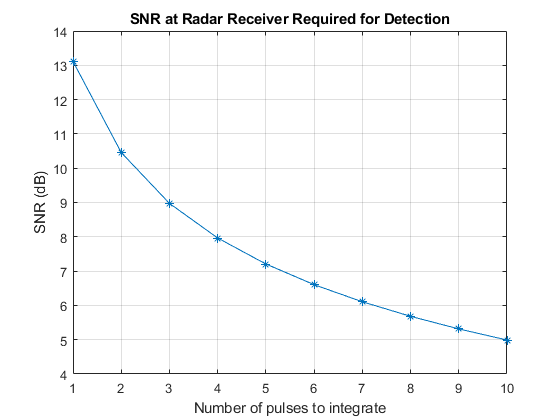
上述分析优化了基于10个脉冲集成系统的雷达发射机功率和位置。现在研究不同的系统操作模式对雷达覆盖的影响,其中要积分的脉冲数是不同的。计算不同脉冲数量下检测目标所需的信噪比阈值。
%计算不同脉冲数对应的信噪比阈值numpulses=1:10;snrthresholds=0(1,nummel(numpulses));对于k=1:numel(numpulses)snrthresholds(k)=albersheim(pd,pfa,numpulses(k));结束%绘制信噪比阈值与要积分的脉冲数情节(numpulses snrthresholds,'-*')标题(“探测雷达接收机所需信噪比”)包含(“要积分的脉冲数”) ylabel (“信噪比”(dB)网格)在;
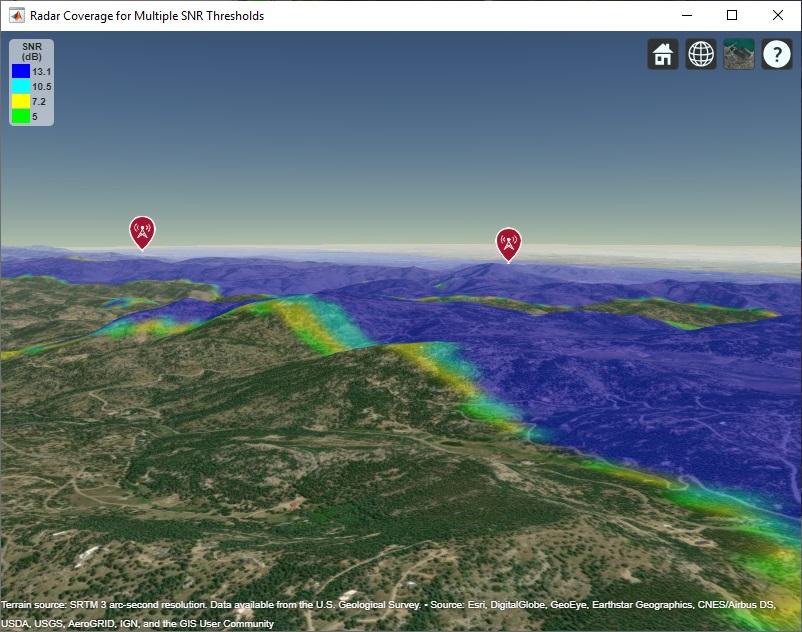
显示与要积分的几个不同脉冲数对应的SNR阈值的雷达覆盖图。增加要积分的脉冲数会降低所需的SNR,从而产生更大的覆盖区域。
%显示最佳网站查看器名称=“多SNR阈值的雷达覆盖范围”;Show (rdrtxs(bestsitenums)) colors = jet(4);颜色(4,:)= [0 1 0];轮廓(rdrData...“水平”,snrthresholds([1 2 5 10]),...“颜色”,颜色,...“传奇标题”legendTitle)

更新目标高度
更新场景,使目标位置在地面以上250米而不是500米。重新运行上述相同的分析,以选择三个最好的雷达站点并可视化覆盖范围。新的覆盖图表明,减少目标的可见性也会减少覆盖区域。
%目标地面高度(m)tgtalt = 250;[L,ds]=helperPathlossOverTerrain(pm、rdrtxs、rdrrxs、TGTLTS、tgtlons、tgtalt);计算所有雷达和目标的信噪比numrdrs =元素个数(rdrtxs);rawsnr = 0 (numtgts numrdrs);对于tgtind = 1: numtgts对于rdrind = 1:numrdrs rawsnr(tgtind,rdrind) = radareqsnr(lambda,ds(tgtind,rdrind),Ptx,pulsewidth,...“收益”antgain,“RCS”tgtrcs,“损失”L (tgtind rdrind));结束结束选择3个雷达站点的最佳组合bestsitenums = helperOptimizeRadarSites(rawsnr, snrthreshold);信噪比= max (rawsnr (:, bestsitenums), [], 2);%显示最佳网站查看器名称=“雷达覆盖”; clearMap(查看器);显示(rdrtxs(最佳站点数))图雷达覆盖范围rdrData=传播数据(TGTLAT、tgtlons、,“信噪比”信噪比);轮廓(rdrData...“水平”,snrthreshold,...“颜色”,“绿色”,...“传奇标题”legendTitle)

显示多个信噪比阈值的雷达覆盖图。
%显示最佳网站查看器名称=“多SNR阈值的雷达覆盖范围”;显示(rdrtxs(bestsitenums))等高线(RDATA,...“水平”,snrthresholds([1 2 5 10]),...“颜色”,颜色,...“传奇标题”legendTitle)

结论
单基地雷达系统设计用于在35000米范围内探测0.1平方米雷达截面(RCS)的非波动目标。在5个候选站点中选择雷达站点,以优化感兴趣区域的探测数量。考虑两个目标高度:距地面500米和距地面250米。覆盖图表明了雷达和目标之间的视线可见度对于实现探测的重要性。第二种情况导致目标更接近地面,因此更有可能被雷达视线所遮挡。这可以通过旋转地图来查看地形,非覆盖区域通常位于山脉的阴影区域。
通过关闭Site Viewer并删除导入的地形数据进行清理。
关闭(观众)removeCustomTerrain (“南博尔德”)
你也可以从以下列表中选择一个网站: