雷达探测因子建模
这个例子展示了如何为详细的雷达距离方程分析建模天线、发射机和接收机的增益和损失。我们首先用雷达方程的信噪比形式计算雷达接收机的可用信噪比(SNR)。接下来,我们将可检测性因子定义为以指定的检测概率进行检测所需的阈值信噪比, ,虚惊一场, .然后,我们估计系统的最大距离为可用信噪比等于可检测因子的距离,即检测与指定的最大距离 而且 仍然是可能的。该示例进一步探讨了雷达系统不同组件引入的损耗对估计最大距离的影响。我们首先考虑了灵敏度时间控制(STC)和重叠对有效信噪比的影响。扫描和信号处理损失,需要增加雷达可探测系数,接下来考虑。本例最后计算结果 在探测器输出端显示损失对雷达系统探测性能的影响。
可用的信噪比
雷达方程结合了雷达系统的主要参数,并允许雷达工程师计算雷达系统的最大探测距离、所需的峰值发射功率或最大可用信噪比。雷达方程通常是一组相对简单的公式,每个公式对应于这三个关键性能特征中的一个。雷达方程的一种常用形式,用于计算某一范围内最大可用信噪比 是:
在哪里
峰值发射功率是多少
发射的脉冲宽度是多少
发射天线增益了吗
接收天线是否有增益
是雷达波长
为雷达目标截面(RCS)
是玻尔兹曼常数吗
系统噪声温度
是综合沿发射器-目标-接收器路径降低接收信号能量的损失的一般损失因子。
在右边,除了目标距离和RCS之外的所有参数都在雷达设计者的控制之下。这个方程表示,对于位于一个范围内的给定大小的目标 ,接收器的信噪比可以通过发射更大的功率、增加天线尺寸、使用更低的频率或使用更灵敏的接收器来提高。
以工作频率为3千兆赫的s波段机场监视雷达为例。峰值发射功率为0.2 MW,发射接收天线增益为34 dB,脉冲持续时间为11 s,噪声系数为4.1 dB。假设需要雷达探测距离为1米的目标 最大范围的RCS 100公里。
λ = freq2waven (3e9);%波长(m)Pt = 0.2e6;峰值功率(W)Tau = 1.1e-5;%脉冲宽度(s)G = 34;发射和接收天线增益(dB)Ts = systemp(4.1);%系统温度(K)RCS = 1;%目标雷达截面(m^2)Rm = 100e3;%所需最大量程(m)
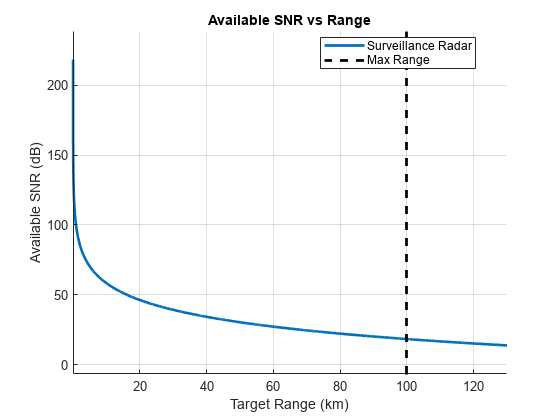
首先,假设没有损失 = 0 dB。我们使用雷达方程来计算接收机的可用信噪比作为目标距离的函数。
L = 0;传输线和传播综合损耗% (dB)R = (1:40:130e3).';%范围样本(m)信噪比= radareqsnr(lambda,R,Pt,tau,“获得”, G,“t”Ts,RCS的rcs,“损失”L);
计算所需最大距离为100公里时的可用信噪比。
SNRatRm = SNR(find(R>=Rm,1))
SNRatRm = 18.3169
绘制最大距离要求与计算出的可用信噪比。
radarmetricplot (R * 1 e - 3,信噪比,“MetricName”,的可用的信噪比,“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,“RadarName”, {“监视雷达”});传奇(“位置”,“最佳”);
所需的信噪比
计算出的可用信噪比是否高到足以进行检测?由于雷达接收机处理的信号是发射波形和随机噪声的组合,所以这个问题的答案取决于所期望的探测概率 以及误报的最大可接受概率 .这些概率定义了所需的信噪比,也称为可探测性因子(或可探测性)。可探测性因子是声明具有指定的探测和假报警概率的探测所需的最小信噪比。它还取决于RCS波动和探测器的类型。计算从一个稳定(转向0)目标接收的单脉冲的可探测系数由平方定律探测器假设 = 0.9和 = 1 e-6。
Pd = 0.9;Pfa = 1e-6;D0 =可检测性(Pd,Pfa,1,“Swerling0”)
D0 = 13.1217
计算一个Swerling 1波动目标的可探测性因子,这是一个对真实世界目标更准确的模型。对于Swerling 1目标,单脉冲可探测系数显著更高。
D1 =可测性(Pd,Pfa,1,“Swerling1”)
D1 = 21.1436
结果所需的信噪比高于可用的信噪比,这意味着一个转弯1目标将不会被单一脉冲检测到。降低可探测系数的常用方法是进行脉冲积分。计算的可检测因子 = 10个非相干积分脉冲。
N = 10;DN =可测性(Pd,Pfa,N,“Swerling1”)
Dn = 13.5033
这比可用信噪比要低。因此,经过10个脉冲的非相干积分后,雷达系统将能够探测到1米的距离 目标所要求的最大距离为100公里,探测概率为0.9,虚警概率为1e-6。
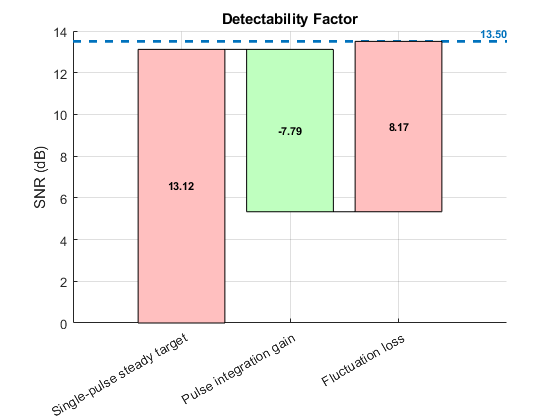
计算了一个转向1目标的可探测系数 脉冲综合了积分增益和波动损失的影响。积分增益是使用单脉冲检测稳定目标所需的信噪比与使用单脉冲检测稳定目标所需的信噪比之间的差值 脉冲。
Gi =可检测性(Pd,Pfa,1,“Swerling0”) -可检测性(Pd,Pfa,N,“Swerling0”)
Gi = 7.7881
波动损失是检测波动目标所需的信噪比与检测稳定目标所需的信噪比之间的差值。
Lf =可检测性(Pd,Pfa,N,“Swerling1”) -可检测性(Pd,Pfa,N,“Swerling0”)
Lf = 8.1696
使用radarbudgetplot函数来说明可检测系数的组成部分。
radarbudgetplot([D0 -Gi Lf], {“单脉冲稳定目标”,“脉冲积分增益”,“波动损失”});标题(的检测能力的因素)
将可探测性因子代入雷达方程的距离形式,作为评估系统实际最大距离所需的最小信噪比。
radareqrng(λ,DN、Pt、τ“获得”, G,“t”Ts,RCS的rcs,“损失”L,“unitstr”,“公里”)
Ans = 131.9308
清楚地表明在哪个范围内的检测与所需的 以及可接受的最大值 是可能的,我们将计算出的可探测性因子作为一条水平线添加到信噪比与距离图中。我们还使用一个红绿灯的颜色编码范围和信噪比水平根据计算可检测性。在可用信噪比曲线经过绿色区域的范围内,雷达满足探测要求;在可用信噪比曲线经过红色区域的范围内,雷达满足指定探测要求 而且 不可能。
radarmetricplot (DN, R * 1 e - 3,信噪比...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {“(没有损失)”}));传奇(“位置”,“最佳”);
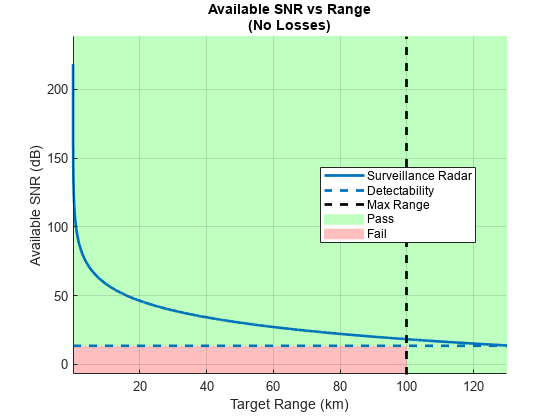
所有超出所需最大范围的范围都显示为绿色并标记为通过。
这种分析假设损失为零,因此不能充分预测实际雷达系统的距离。具有指定参数的真实雷达系统将具有较短的最大距离,原因如下:
由地球表面和大气引起的传播效应。这些影响减少了接收机的可用信号能量。
雷达系统经历了各种各样的损失。这一类中的一些损失降低了可用信噪比,而其他损失导致可检测系数增加。
下面几节将更详细地考虑属于第二类的损耗对雷达系统距离性能的影响。
Range-dependent因素
在设计监视雷达系统时,雷达方程中必须包括几个因素,以解释接收机可用信号能量的减少。
黯然失色
脉冲雷达系统在脉冲发射时关闭接收器。因此,来自雷达一个脉冲长度范围内的目标回波或在无歧义范围周围的一个脉冲长度范围内的目标回波将被发射脉冲所掩盖,导致只有一小部分脉冲被接收和处理。本例中所考虑的雷达系统的脉冲宽度为11 .能接收到完整脉冲的最近距离是最小距离 .
Rmin = time2range(tau)
Rmin = 1.6489e+03
距离1649米以内的目标回波将在脉冲传输完成前到达。同样的效果也可以观察到目标位于或附近的明确范围的倍数。假设脉冲重复频率为1350 Hz(脉冲重复间隔 0.75 ms),计算系统的无歧义范围。
PRF = 1350;%脉冲重复频率Rua = time2range(1/prf)
Rua = 1.1103e+05
来自山脉的回声 会被下一个发射的脉冲遮蔽。这张图说明了脉冲蚀变。箭头表示脉冲的前端。
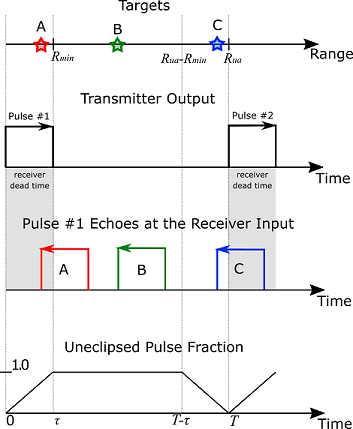
由于日食,可用的信噪比将在0范围和等于倍数的范围有深缺口 .在雷达方程中加入日蚀因子,以解释由于脉冲日蚀造成的可用信噪比损失。
Du = tau*prf;占空比%Fecl =日食因子(R,Du,prf);%月蚀因子信噪比= radareqsnr(lambda,R,Pt,tau,“获得”, G,“t”Ts,RCS的rcs,“CustomFactor”Fecl,“损失”L);radarmetricplot (DN, R * 1 e - 3,信噪比...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {“(重叠)”}));传奇(“位置”,“最佳”);
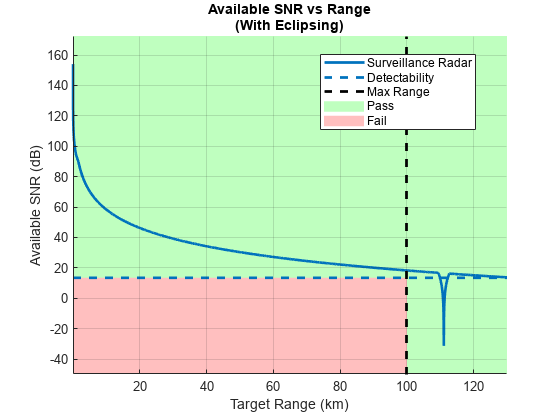
现实雷达系统利用PRF分集来防止蚀损和扩大系统的明确范围。
灵敏度时间控制(STC)
一个典型的监视雷达系统必须传输相当大的功率来探测远距离目标。虽然可用能量随着距离的增加而迅速衰减,但在非常近的距离上,由于峰值发射功率高,即使是小目标也会有非常强的回报。来自小目标(鸟、昆虫)的强烈信号可能会导致不受欢迎的探测,而正常大小的目标或附近的杂波会使接收器饱和。对于监视雷达系统来说,避免这类干扰检测是非常可取的。为了解决这一问题,雷达系统采用了STC技术。它将接收器增益扩大到一个截止范围 在目标接近雷达时保持恒定的信号强度。
Rstc = 60e3;% STC截止范围(m)Xstc = 4;选择% STC指数,以保持在低于Rstc范围内的目标可检测性(因为信号功率与R^4成反比)Fstc = stcfactor(R,Rstc,Xstc);% STC因子信噪比= radareqsnr(lambda,R,Pt,tau,“获得”, G,“t”Ts,RCS的rcs,“CustomFactor”, Fecl + Fstc,“损失”L);radarmetricplot (DN, R * 1 e - 3,信噪比...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {'(与STC和蚀为1 m^2目标)'}));传奇(“位置”,“最佳”);ylim (30 [-30])
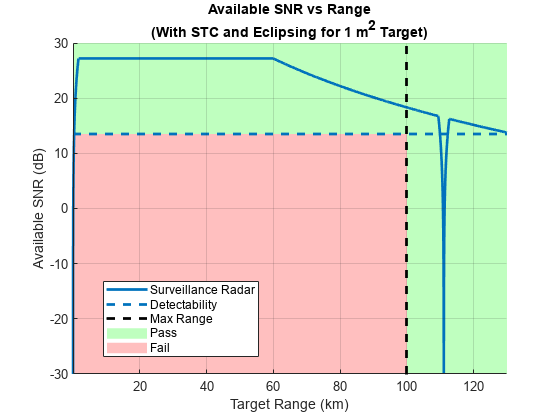
在加入STC因子后,该图显示1 m RCS目标在最大范围内仍能被检测到 , RCS为0.03 m的小目标 是否能达到要求 在任何范围内均为0.9,因此将被拒绝。
SNRsmallRCS = radareqsnr(lambda,R,Pt,tau,“获得”, G,“t”Ts,RCS的, 0.03,“CustomFactor”, Fecl + Fstc,“损失”L);radarmetricplot (R * 1 e - 3、SNRsmallRCS DN,...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {(与STC和蚀0.03 m^2目标)}));传奇(“位置”,“最佳”);ylim (20 [-30])
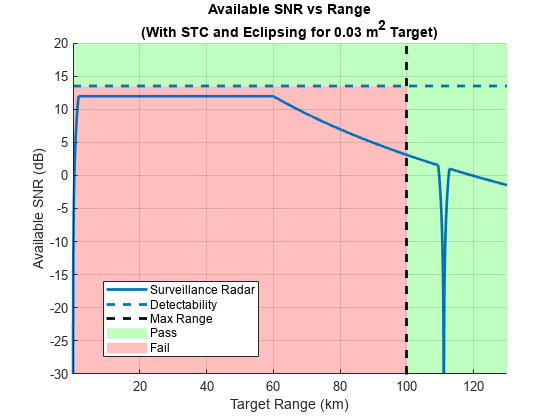
从这些图中可以清楚地看出,STC仅将可用信噪比扩展到指定的截止范围,而不会影响最大感兴趣范围内的可用信噪比。
扫描
雷达系统可以通过机械旋转天线或使用相控阵天线并执行电子扫描来扫描搜索体。天线波束的不完美形状和波束扫过搜索体积的过程会给系统带来额外的损失。
梁形损失
雷达方程使用天线增益的峰值,假设每个接收脉冲具有最大振幅。实际上,当波束通过目标时,接收到的脉冲被扫描天线的双向模式调制,导致波束形状损失。计算这种损失的确切值需要知道确切的天线模式。在雷达系统设计的早期阶段,这种类型的分析通常是不可用的。相反,一个典型的实用天线的主瓣的形状可以很好地近似为高斯形状。假设雷达系统在空间域内进行密集采样(波束移动小于半功率波束宽度的0.71),计算一维扫描的波束形状损失。
Lb =波束损耗
Lb = 1.2338
如果雷达系统同时在方位角和仰角扫描,波束形状损失将增加一倍。
beamloss(真正的)
Ans = 2.4677
扫描扇区丢失
在这个例子中,我们假设雷达系统采用电子控制相控阵来执行扫描。使用相控阵天线会导致所需信噪比的增加,原因有两个:1)波束展宽,因为波束方向上投影的阵列面积减小;2)单个阵列单元在离舷角时的有效孔径面积减小。为了解释这些影响,将扫描扇区损失添加到可检测性因子中。假设示例中的系统仅在方位角维度上进行扫描,并且扫描扇区的跨度为-60到60度。计算最终损失。
Theta = [-60 60];(Pd,Pfa,N,theta,“Swerling1”)
拉里= 2.7745
信号处理
在探测之前,接收到的雷达回波必须通过雷达信号处理链。信号处理链中不同组件的目的是保证所需的检测和虚警概率,拒绝来自杂波的不需要的回波,并考虑变量或非高斯噪声。我们进一步考虑在监视雷达系统中必须考虑的信号处理损失的几个组成部分。
结核杆菌感染
移动目标指示器(MTI)是在传递来自显著速度运动目标的回波时,对固定或缓慢移动杂波进行拒接的过程。典型的MTI使用2、3或4个脉冲消除器,实现高通滤波器以拒绝低多普勒频移的回波。将接收到的信号通过MTI脉冲消除器引入噪声样本之间的相关性。这反过来又减少了可用于集成的独立噪声样本的总数,从而导致MTI噪声相关性损失。此外,MTI抵消器显著抑制速度接近其频率响应零值的目标,导致额外的MTI速度响应损失。假设使用2脉冲抵消器,计算MTI损耗的这两个分量。
M = 2;[Lmti_a, Lmti_b] = mtiloss(Pd,Pfa,N,m,“Swerling1”)
Lmti_a = 1.4468
Lmti_b = 8.1562
在使用单个PRF的系统中,MTI速度响应损失可能非常高,以满足高检测概率的要求。为了消除这种损失,在实际雷达系统中几乎总是使用PRF分集。
二进制集成
二值积分是一种次优非相干积分技术,也称为M-of-N积分。如果 的 接收到的脉冲超过预定的阈值,就宣布存在一个目标。二进制积分器是一种相对简单的自动检测器,对目标回波可能存在的单个大干扰脉冲的影响不太敏感。因此,当背景噪声或杂波是非高斯分布时,二元积分器具有更好的鲁棒性。由于二元积分是一种次优技术,与最优非相干积分相比,它会导致二元积分损失。的最优值 是一个不敏感的选择,它可以与最优值有很大的差异而不显着的惩罚,导致二进制积分损失低于1.4 dB。计算时的二元积分损失 是10和 设置为6。
M = 6;Lbint = binaryintloss(Pd,Pfa,N,M)
Lbint = 1.0549
的binaryintloss函数计算一个稳定的(转向0)目标的损失。由于可测性因子中包含了波动损失,在目标波动的情况下,可以使用相同的二进制积分损失计算。
CFAR
恒虚警率(CFAR)检测器用于在噪声或干扰水平变化时保持近似恒定的虚警率。由于CFAR对有限数量的参考单元进行平均来估计噪声水平,因此估计会出现误差,从而导致CFAR损失。CFAR损失是指当噪声级别未知时,与已知噪声级别的固定阈值相比,使用CFAR实现所需检测性能所需的信噪比的增加。计算CFAR损失,假设共有120个单元用于单元平均CFAR。
Nrc = 120;Lcfar = cfarloss(Pfa,Nrc)
Lcfar = 0.2500
有效探测系数
扫描和信号处理损失增加了可检测系数,这意味着需要更多的能量来进行检测。由此产生的可测性因子,包括所有这些损失的影响,称为有效可测性因子。使用radarbudgetplot函数创建一个瀑布图,显示计算扫描和信号处理损失对可检测性因子的组合影响。
D = [D0 -Gi Lf Lmti_a+Lmti_b Lbint Lcfar Larray Lb];radarbudgetplot (D, {“单脉冲稳定目标”,“脉冲积分增益”,“波动损失”...“MTI损失”,“二元积分损失”,“CFAR损失”,“扫描扇区丢失”,“梁形损失”});标题(的检测能力的因素)
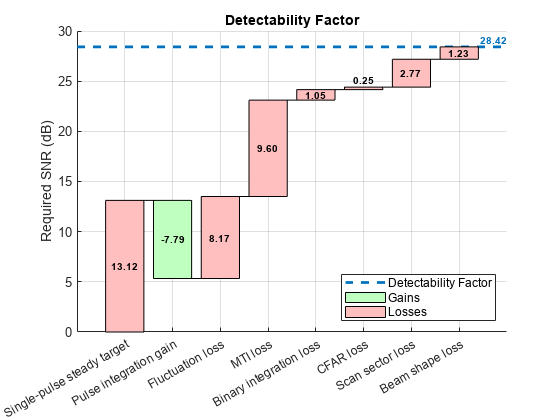
得到的有效可检测系数为28.42 dB。通过考虑扫描和信号处理损失,所需的信噪比增加了近15 dB。分析表明,该系统实际不能满足1 m的检测要求 RCS目标在100公里处 = 0.9和 = 1 e-6。
radarmetricplot (R * 1 e - 3、信噪比和(D),...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {(带有STC,日食,扫描和信号处理损失)}))传说(“位置”,“最佳”) ylim([-10 30]);
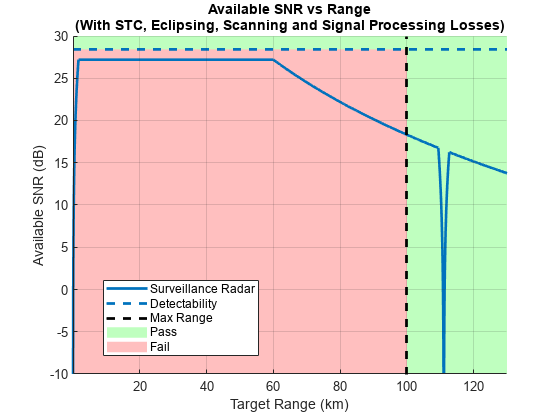
这个问题可以通过增加可用信噪比或降低所需信噪比来解决。发射更大的功率或增加天线增益会提高可用信噪比,而增加积分时间则会降低所需信噪比。然而,在某些应用程序中,系统参数的子集可能受到其他需求的约束,因此不能更改。例如,如果分析是针对现有系统执行的,那么增加可用信噪比可能就不是一个选项。在这种情况下,对信号处理链进行调整以降低可检测性因子可能是一个可接受的解决方案。为了降低所需的信噪比,在下面的部分中,我们假设脉冲数 从10增加到40。
此外,我们可以改变对最大距离和检测概率的要求。而不是一个单一的数字指定所需的探测概率或最大范围,一对客观的而且阈值可以定义值。的客观的需求描述了为完全满足任务需要而需要的系统的预期性能水平。的阈值需求描述了系统可接受的最低性能水平。使用一对值来定义需求,而不是单个值,为设计提供了更大的灵活性,并为选择系统参数创建了一个交易空间。在这个例子中,我们假设客观的要求
是0.9和设置阈值取值为0.8。类似地,客观的最大航程要求仍然是100公里,而阈值值设置为90公里。的可检测因子现在已计算客观的和阈值
.
N = 40;M = 18;Pd = [0.9 0.8];[Lmti_a, Lmti_b] = mtiloss(Pd,Pfa,N,m,“Swerling1”);Dx =可测性(Pd,Pfa,N,“Swerling1”) + cfarloss(Pfa,Nrc) +波束损耗...+ Lmti_a + Lmti_b + binaryintloss(Pd,Pfa,N,M) + arrayscanloss(Pd,Pfa,N,theta,“Swerling1”)
Dx =2×124.2522 - 18.0494
Rm = [100e3 90e3];radarmetricplot (R * 1 e - 3,信噪比,Dx (1), Dx (2),...“MetricName”,的可用的信噪比,...“RequirementName”,的检测能力,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,“MetricUnit”,“数据库”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});标题([{“可用信噪比与距离”}, {“(N = 40)”}))传说(“位置”,“最佳”) ylim([-10 30]);
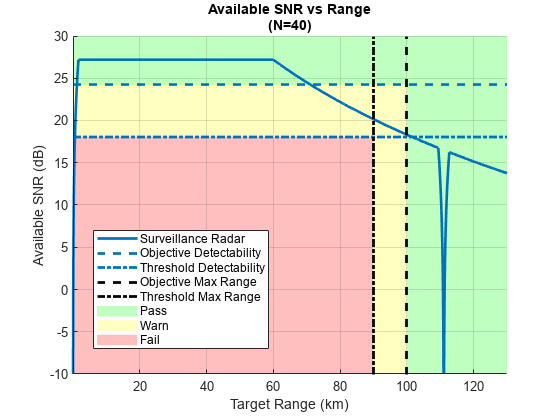
信噪比与范围图现在有一个黄色警告区域,指示信噪比值和目标范围,系统的性能在客观的和阈值要求。我们可以看到,在大约70公里处系统会遇到客观的要求
.从70公里到100公里客观的要求
,而阈值需求仍然得到满足。
有效发现概率
上面的信噪比与距离图表明,雷达系统的探测性能随距离的变化而变化。A 1米 70公里以下的目标被探测到的概率大于等于0.9,而70公里到100公里的目标被探测到的概率为 至少0.8。由于一些考虑的损失取决于发现的概率,实际的 在检测器输出随范围变化。我们可以用ROC曲线来计算 作为距离的函数。
生成用于计算ROC曲线的概率值向量P = probgrid(0.1,0.9999,100);在这些概率下计算所需的信噪比[lmti_a, lmti_b] = mtiloss(p,Pfa,N,m,“Swerling1”);dx =可检测性(p,Pfa,N,“Swerling1”) + cfarloss(Pfa,Nrc) +波束损耗...+ lmti_a + lmti_b + binaryintloss(p,Pfa,N,M) + arrayscanloss(p,Pfa,N,theta,“Swerling1”);绘制ROC曲线helperRadarPdVsSNRPlot (dx, p, [0.1 - 0.9999]);
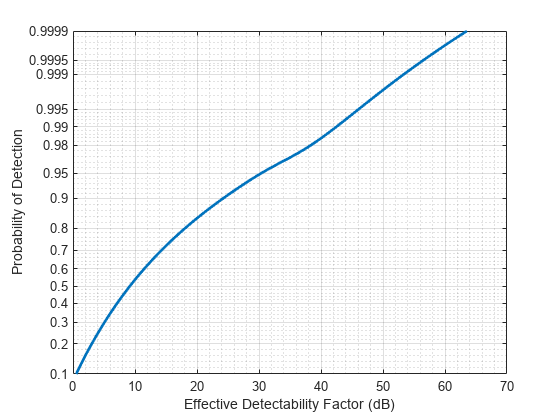
在检测器输出处的有效检测概率现在可以通过在可用信噪比值处插值此ROC曲线来计算。
在可用信噪比处插值ROC曲线Pdeff = rocinterp(dx,p,SNR,“snr-pd”);绘制有效Pd作为范围的函数radarmetricplot (R * 1 e - 3、Pdeff Pd (1) Pd (2),...“MetricName”,“有效P_d”,...“RequirementName”,“P_d”,...“MaxRangeRequirement”Rm * 1 e - 3,...“RangeUnit”,“公里”,...“ShowStoplight”,真的,...“RadarName”, {“监视雷达”});传奇(“位置”,“最佳”) ylim([0.5 1.0])
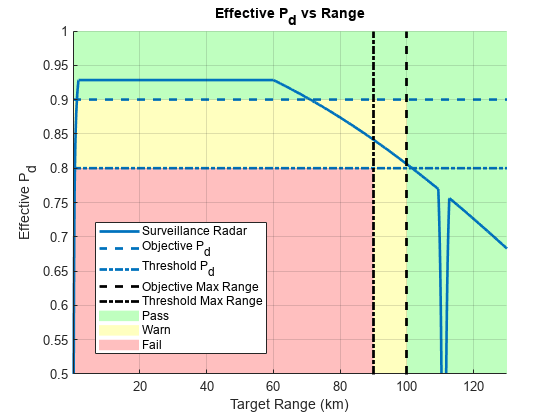
这一结果表明,由于STC的应用,探测概率几乎是恒定的范围从2公里到60公里。对于一个1m的目标
RCS > 0.92。在70公里至87公里范围内有效
高于0.85。在阈值取值为最大距离要求时,探测概率约为0.84,在客观的100公里射程略高于0.8。
总结
这个例子显示了各种损失如何影响雷达系统的探测性能。本文从一个雷达方程出发,介绍了有效信噪比和可探测性因子的概念。以一个监视雷达系统为例,说明了STC和日食是如何降低有效信噪比的,而扫描和信号处理损失则增加了可探测系数。最后,实例演示了如何计算不同目标范围下接收机输出处的有效探测概率。
参考文献
巴顿,D. K。现代雷达的雷达方程.Artech House, 2013年。
理查兹,m.a.,希尔,j.a. &霍尔姆,w.a.。《现代雷达原理:基本原理》。科技出版,2010。
您也可以从以下列表中选择一个网站: