旋转机械振动分析gydF4y2Ba
这个例子展示了如何利用时间同步平均和包络谱分析来自齿轮箱的振动信号。这些功能在齿轮箱的预测维护中特别有用,因为齿轮箱包含多个旋转部件:齿轮、轴和轴承。gydF4y2Ba
这个例子产生并分析了以固定速度旋转的齿轮箱的振动数据。时间同步平均用于隔离与特定轴或齿轮相关的振动部件,并平均出所有其他部件。包络谱在识别引起高频冲击的局部轴承故障时特别有用。gydF4y2Ba

考虑理想化变速箱,其由具有35齿齿轮13的小齿轮齿啮合的。所述小齿轮被连接到连接到原动机的输入轴。的齿轮连接到输出轴。该轴通过齿轮箱壳体上滚子轴承支万博1manbetx承。两个加速度计,gydF4y2Ba 和gydF4y2Ba ,分别安装在轴承和齿轮箱体上。加速度计的采样率为20千赫。gydF4y2Ba
小齿轮以一定的速度转动gydF4y2Ba = 22.5 Hz或1350 rpm。齿轮和输出轴的转速为gydF4y2Ba
。gydF4y2Ba
齿啮合频率,也叫齿轮啮合频率,是齿轮和小齿轮周期性啮合的频率:gydF4y2Ba
。gydF4y2Ba
fs = 20 e3;gydF4y2Ba%采样率(Hz)gydF4y2BaNp = 13;gydF4y2Ba小齿轮上的齿数gydF4y2Ba伍= 35;gydF4y2Ba齿轮上的齿数gydF4y2BafPin = 22.5;gydF4y2Ba%小齿轮(输入)轴频(Hz)gydF4y2BafGear = fPin * Np / Ng;gydF4y2Ba%齿轮(输出)轴频(Hz)gydF4y2BafMesh = fPin * Np;gydF4y2Ba齿轮啮合频率(Hz)gydF4y2Ba
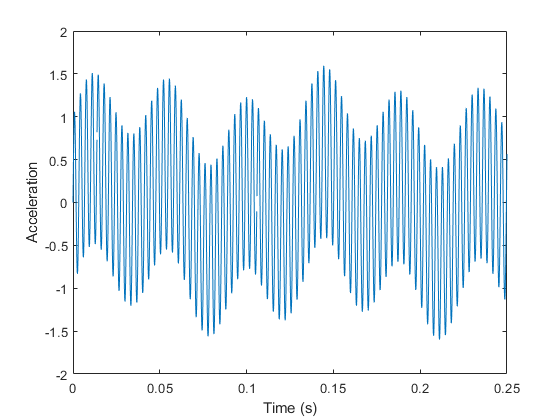
产生小齿轮和齿轮的振动波形。模拟振动作为正弦波发生在初级轴齿轮啮合频率。分析20秒的振动数据。gydF4y2Ba
齿轮啮合的波形负责传递载荷,因此具有最高的振幅。gydF4y2Ba 记录来自两个轴和齿轮啮合的振动贡献。在本实验中,轴承滚动单元对所记录的振动信号的贡献gydF4y2Ba 被认为是微不足道的。设想一段无噪声的振动信号。gydF4y2Ba
t = 0:1 / fs: 20:1 / fs;vfIn = 0.4 * sin(2 *π* fPin * t);gydF4y2Ba%齿轮波形gydF4y2BavfOut = 0.2 * sin(2 *π* fGear * t);gydF4y2Ba%齿轮波形gydF4y2BavMesh =罪(2 *π* fMesh * t);gydF4y2Ba%齿轮啮合波形gydF4y2Baplot(t, vfIn + vfOut + vMesh) xlim([0 0.25]) xlabel(gydF4y2Ba“时间(s)”gydF4y2Ba)ylabel (gydF4y2Ba“加速”gydF4y2Ba)gydF4y2Ba
产生齿轮齿局部故障引起的高频冲击gydF4y2Ba
假设齿轮的一颗齿受到局部故障的影响,例如断裂。这导致了高频冲击发生一次每轮齿轮。gydF4y2Ba
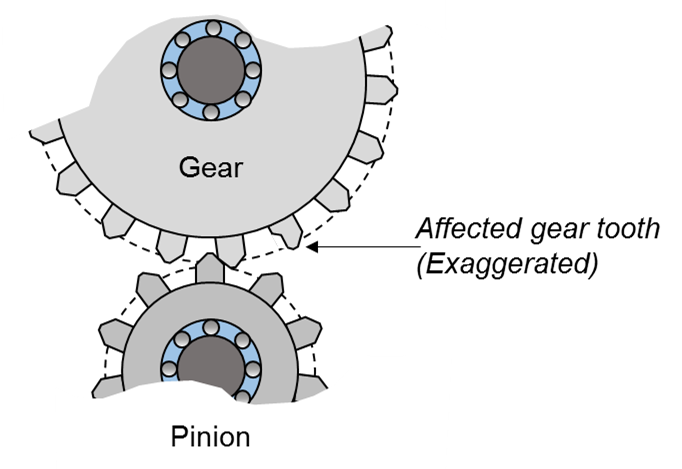
局部故障引起的冲击持续时间短于齿面啮合的持续时间。齿轮齿面上的凹痕会在撞击期间产生高频振荡。冲击频率取决于齿轮箱部件的特性及其固有频率。在这个例子中,它是任意假设的冲击造成一个2千赫的振动信号,并发生在持续时间约8%gydF4y2Ba1 / fMeshgydF4y2Ba,或0.25毫秒。这种冲击每轮重复一次。gydF4y2Ba
ipf = fGear;fImpact = 2000;tImpact = 0:1 / fs: 2.5 e-4-1 / fs;xImpact =罪(2 *π* fImpact * tImpact) / 3;gydF4y2Ba
通过将冲击与梳状函数进行卷积使其具有周期性。gydF4y2Ba
xComb = 0(大小(t));IND =(0.25 * FS / fMesh):( FS / IPF):长度(T);IND =圆(茚基);xComb(茚基)= 1;XPER = 2 * CONV(xComb,xImpact,gydF4y2Ba“相同”gydF4y2Ba);gydF4y2Ba
添加故障信号gydF4y2Ba水稻播种期及秧龄gydF4y2Ba到传动轴的信号。在无故障齿轮和有故障齿轮的输出信号中加入高斯白噪声对输出进行建模gydF4y2Ba
。gydF4y2Ba
vNoFault = vfIn + vfOut + vMesh;vFault = vNoFault + xPer;vnofaultnoise = vNoFault + randn(size(t))/5;vfaultnoise = vFault + randn(size(t))/5;gydF4y2Ba
想象一段时间的历史。碰撞位置通过倒转的红色三角形显示在故障齿轮的图上。他们几乎无法区分。gydF4y2Ba
次要情节(2,1,1)情节(t, vNoFaultNoisy)包含(gydF4y2Ba“时间(s)”gydF4y2Ba)ylabel (gydF4y2Ba“加速”gydF4y2Ba) xlim([0.0 0.3]) ylim([-2.5 2.5])gydF4y2Ba“健康齿轮噪音信号”gydF4y2Ba) subplot(2,1,2) plot(t, vfaultnoise) xlabel(gydF4y2Ba“时间(s)”gydF4y2Ba)ylabel (gydF4y2Ba“加速”gydF4y2Ba) xlim([0.0 0.3]) ylim([-2.5 2.5])gydF4y2Ba“故障齿轮的噪声信号”gydF4y2Ba)举行gydF4y2Ba在gydF4y2BaMarkX = t(印第安纳州(1:3));挞伐= 2.5;情节(MarkX挞伐,gydF4y2Ba“房车”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“红色”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba

比较两种信号的功率谱gydF4y2Ba
局部化的齿轮故障导致齿轮啮合频率附近出现分布的边带:gydF4y2Ba
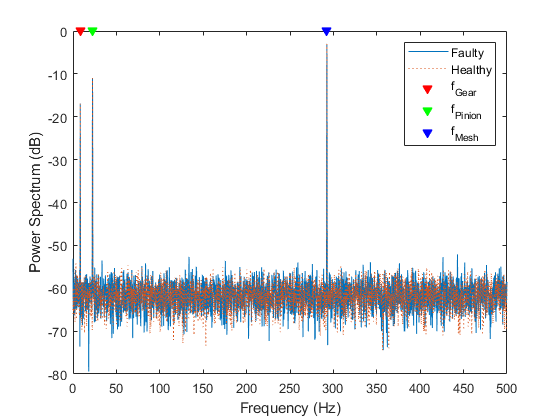
计算健康齿轮和故障齿轮的频谱。指定一个频率范围,包括轴频为8.35 Hz和22.5 Hz,齿轮啮合频率为292.5 Hz。gydF4y2Ba
[Spect,f] = pspectrum([vfaultnoise ' vnofaultnoise ']),fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,0.2,gydF4y2Ba“FrequencyLimits”gydF4y2Ba500年[0]);gydF4y2Ba
绘制光谱。由于故障发生在齿轮上,而不是小齿轮上,侧带预计会出现在gydF4y2Ba
和间隔gydF4y2Ba
除了光谱。光谱显示了预期的峰值gydF4y2BafGeargydF4y2Ba,gydF4y2BafPingydF4y2Ba,gydF4y2BafMeshgydF4y2Ba。然而,噪声的信号中的存在使得边带的峰在gydF4y2Ba
无法区分。gydF4y2Ba
图绘制(f, 10 * log10 (Spect (: 1)), f, 10 * log10 (Spect (:, 2)),gydF4y2Ba“:”gydF4y2Ba)包含(gydF4y2Ba的频率(赫兹)gydF4y2Ba)ylabel (gydF4y2Ba的功率谱(dB)gydF4y2Ba)举行gydF4y2Ba在gydF4y2Ba情节(fGear 0gydF4y2Ba“房车”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“红色”gydF4y2Ba)情节(fPin 0,gydF4y2Ba“全球之声”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“绿色”gydF4y2Ba)情节(fMesh 0,gydF4y2Ba“bv”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“蓝”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba传奇(gydF4y2Ba“错误”gydF4y2Ba,gydF4y2Ba“健康”gydF4y2Ba,gydF4y2Ba“f{齿轮}”gydF4y2Ba,gydF4y2Ba“f{齿轮}”gydF4y2Ba,gydF4y2Ba“f{网}”gydF4y2Ba)gydF4y2Ba
放大附近的齿轮啮合频率。创建一个网格齿轮和小齿轮侧带在gydF4y2Ba 和gydF4y2Ba 。gydF4y2Ba
图p1 = plot(f,10*log10(Spect(:,1)));包含(gydF4y2Ba的频率(赫兹)gydF4y2Ba)ylabel (gydF4y2Ba的功率谱(dB)gydF4y2Ba) xlim([250 340]) ylim([-70 -40]) holdgydF4y2Ba在gydF4y2Bap2 =情节(f, 10 * log10 (Spect (:, 2)));谐波= 5;SBandsGear = (fMesh + fGear。*谐波);(X1, Y1) = meshgrid (SBandsGear ylim);SBandsPinion = (fMesh + fPin。*谐波);(X2, Y2) = meshgrid (SBandsPinion ylim);p3 =情节(X1, Y1,gydF4y2Ba“:r”gydF4y2Ba);p4 =情节(X2, Y2),gydF4y2Ba”:k”gydF4y2Ba);持有gydF4y2Ba从gydF4y2Ba图例([p1 p2 p3(1) p4(1)],{gydF4y2Ba“有缺陷的装置”gydF4y2Ba;gydF4y2Ba“健康齿轮”gydF4y2Ba;gydF4y2Ba“f{边带、齿轮}”gydF4y2Ba;gydF4y2Ba“f{边带,齿轮}”gydF4y2Ba})gydF4y2Ba
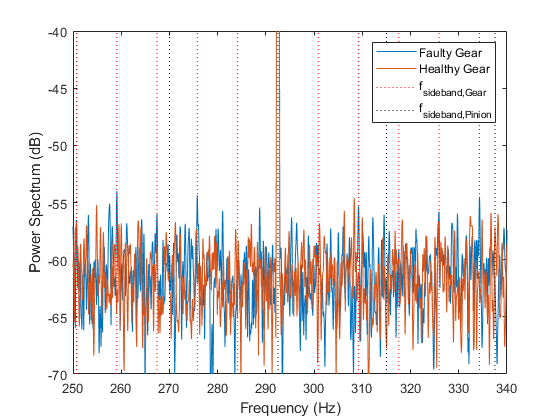
目前尚不清楚峰值是否与齿轮侧带对齐gydF4y2Ba 。gydF4y2Ba
对输出的振动信号进行时间同步平均gydF4y2Ba
请注意,在齿轮侧带的峰值是很难分开的,gydF4y2Ba 和小齿轮侧带,gydF4y2Ba 。前一节显示了在分离峰值和确定小齿轮或齿轮是否受到故障影响方面的困难。时间同步平均平均出零平均随机噪声和任何波形与特定轴的频率无关。这使得故障检测过程更加简单。gydF4y2Ba
使用的函数gydF4y2Ba运输安全管理局gydF4y2Ba为小齿轮和齿轮产生时间同步的波形。gydF4y2Ba
指定小齿轮的时间同步脉冲。计算小齿轮10次旋转的时间同步平均值。gydF4y2Ba
tPulseIn = 0:1 / fPin:马克斯(t);tPulseIn taPin = tsa (vFaultNoisy fs,gydF4y2Ba“NumRotations”gydF4y2Ba10);gydF4y2Ba
指定齿轮的时间同步脉冲。计算齿轮10次旋转的时间同步平均值。gydF4y2Ba
tPulseOut = 0:1 / fGear:马克斯(t);tPulseOut taGear = tsa (vFaultNoisy fs,gydF4y2Ba“NumRotations”gydF4y2Ba10);gydF4y2Ba
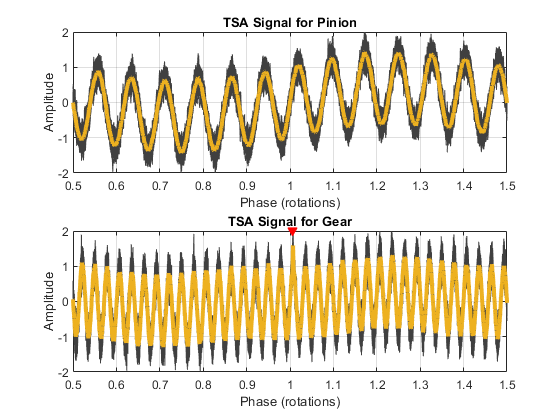
可视化时间同步信号为一个单一的旋转。这种影响在齿轮的时间同步平均信号上比较容易看到,而在小齿轮轴上比较容易看到。用记号笔在图上标出撞击的位置,其振幅比相邻的齿轮啮合峰值要高。gydF4y2Ba
运输安全管理局gydF4y2Ba无输出参数的函数绘制出当前图中各信号段对应的时间同步平均信号和时域信号。gydF4y2Ba
图次要情节(2,1,1)tsa (fs, vFaultNoisy tPulseIn,gydF4y2Ba“NumRotations”gydF4y2Ba,10) xlim([0.5 1.5]) ylim([-2]) title(gydF4y2Ba'TSA小齿轮信号'gydF4y2Ba次要情节(2,1,2)tsa (fs, vFaultNoisy tPulseOut,gydF4y2Ba“NumRotations”gydF4y2Ba,10) xlim([0.5 1.5]) ylim([-2]) title(gydF4y2Ba'TSA齿轮信号'gydF4y2Ba)举行gydF4y2Ba在gydF4y2Ba图(1.006,2,gydF4y2Ba“房车”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“红色”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba
可视化时间同步平均信号的功率谱gydF4y2Ba
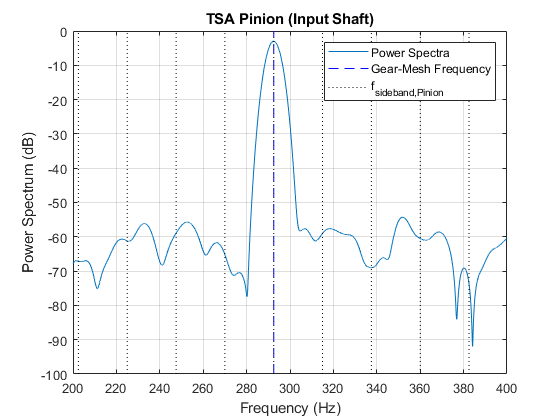
计算了时间同步平均齿轮信号的功率谱。指定一个频率范围,在292.5 Hz的齿轮啮合频率的两侧各覆盖15个齿轮侧带。注意峰值gydF4y2Ba 。gydF4y2Ba
图pspectrum (taGear fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,2.2,gydF4y2Ba“FrequencyLimits”gydF4y2Ba,[200400])谐波= -15:15;SBandsGear = (fMesh + fGear。*谐波);(X1, Y1) = meshgrid (SBandsGear ylim);[XM, YM] = meshgrid (fMesh ylim);持有gydF4y2Ba在gydF4y2Ba情节(XM, YM,gydF4y2Ba“——k”gydF4y2Ba(X1, Y1,gydF4y2Ba“:r”gydF4y2Ba)传说(gydF4y2Ba的功率谱gydF4y2Ba,gydF4y2Ba齿轮啮合频率的gydF4y2Ba,gydF4y2Ba“f{边带、齿轮}”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba标题(gydF4y2BaTSA齿轮(输出轴)gydF4y2Ba)gydF4y2Ba

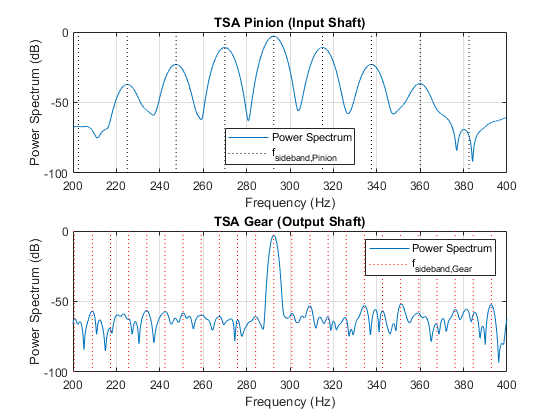
将时间同步平均小齿轮信号在相同频率范围内的功率谱可视化。此时,绘制网格线在gydF4y2Ba 频率的位置。gydF4y2Ba
图pspectrum (taPin fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,5.8,gydF4y2Ba“FrequencyLimits”gydF4y2Ba,[200400]) SBandsPinion = (fMesh+fPin.*harmonics);(X2, Y2) = meshgrid (SBandsPinion ylim);[XM, YM] = meshgrid (fMesh ylim);持有gydF4y2Ba在gydF4y2Ba情节(XM, YM,gydF4y2Ba“——b”gydF4y2BaX2, Y2,gydF4y2Ba”:k”gydF4y2Ba)传说(gydF4y2Ba的功率谱gydF4y2Ba,gydF4y2Ba齿轮啮合频率的gydF4y2Ba,gydF4y2Ba“f{边带,齿轮}”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba标题(gydF4y2Ba'TSA小齿轮(输入轴)'gydF4y2Ba)gydF4y2Ba
注意这里没有突出的山峰gydF4y2Ba 的阴谋。gydF4y2Ba
原始信号的功率谱包含来自两个不同轴的波形和噪声。边带谐波是很难分辨的。但是,可以观察到时间同步平均齿轮信号频谱上边带位置的显著峰值。还要观察边带大小的不均匀性,它是齿轮局部故障的指示器。另一方面,时间同步平均小齿轮信号的频谱中不存在边带峰。这有助于我们得出结论,即小齿轮可能是健康的。gydF4y2Ba
通过平均出不相关的波形gydF4y2Ba运输安全管理局gydF4y2Ba功能有助于识别故障齿轮通过查看边带谐波。当需要从具有多个轴和齿轮的变速箱中提取与单个轴相对应的振动信号时,此功能尤其有用。gydF4y2Ba
在小齿轮上增加一个分布的故障,并将其影响纳入振动信号gydF4y2Ba
分布式齿轮故障,例如偏心或齿轮错位[1],使得被狭义分组周围整数齿轮啮合频率的倍数更高级别的边带。gydF4y2Ba

为了模拟一个分布的故障,在齿轮啮合频率的每一侧引入振幅减小的边带分量。gydF4y2Ba
显然=三3;边带= [0.02 0.1 0.4 0 0.4 0.1 0.02];gydF4y2Ba%边带振幅gydF4y2Ba边带fMesh +边带*fPin;gydF4y2Ba%边带频率gydF4y2BavSideBands = SideBandAmp * sin(2 *π* SideBandFreq”。* t);gydF4y2Ba
边带信号添加到振动信号。这导致在幅度调制。gydF4y2Ba
vpinfaultnoise = vfaultnoise + vsideband;gydF4y2Ba
将受分布故障影响的变速箱的一段时间历史可视化。gydF4y2Ba
plot(t, vpinfaultnoise) xlim([0.6 0.85]) xlabel(gydF4y2Ba“时间(s)”gydF4y2Ba)ylabel (gydF4y2Ba“加速”gydF4y2Ba)标题(gydF4y2Ba边带调制的影响gydF4y2Ba)gydF4y2Ba

重新计算小齿轮和齿轮的时间同步平均信号。gydF4y2Ba
taPin = TSA(vPinFaultNoisy,FS,tPulseIn,gydF4y2Ba“NumRotations”gydF4y2Ba10);tPulseOut taGear = tsa (vFaultNoisy fs,gydF4y2Ba“NumRotations”gydF4y2Ba10);gydF4y2Ba
可视化的时间同步的平均信号的功率谱。三个边带在所述小齿轮的时间同步的平均信号是其指示分布式故障的存在更显着。然而,时间同步平均的齿轮信号的频谱保持不变。gydF4y2Ba
次要情节(2,1,1)pspectrum (taPin fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,5.8,gydF4y2Ba“FrequencyLimits”gydF4y2Ba400年[200])gydF4y2Ba在gydF4y2Ba情节(X2, Y2,gydF4y2Ba”:k”gydF4y2Ba)传说(gydF4y2Ba的功率谱gydF4y2Ba,gydF4y2Ba“f{边带,齿轮}”gydF4y2Ba,gydF4y2Ba“位置”gydF4y2Ba,gydF4y2Ba“南”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba标题(gydF4y2Ba'TSA小齿轮(输入轴)'gydF4y2Ba次要情节(2,1,2)pspectrum (taGear fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,2.2,gydF4y2Ba“FrequencyLimits”gydF4y2Ba400年[200])gydF4y2Ba在gydF4y2Ba情节(X1, Y1,gydF4y2Ba“:r”gydF4y2Ba)传说(gydF4y2Ba的功率谱gydF4y2Ba,gydF4y2Ba“f{边带、齿轮}”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba标题(gydF4y2BaTSA齿轮(输出轴)gydF4y2Ba)gydF4y2Ba
总之,gydF4y2Ba运输安全管理局gydF4y2Ba功能有助于提取齿轮和小齿轮的贡献,从整体振动信号。这反过来又有助于识别受局部和分布式故障影响的特定组件。gydF4y2Ba
滚动轴承故障的振动分析gydF4y2Ba
滚动轴承的局部故障可能发生在外圈、内圈、保持架或滚动部件上。每一种故障都以其自身的频率为特征,这些频率通常由制造商列出或从轴承规格中计算出来。局部故障的冲击会在轴承和响应传感器[2]之间的齿轮箱结构中产生高频振动。假设齿轮箱中的齿轮是健康的,其中一个支撑小齿轮轴的轴承受到内圈局部故障的影响。万博1manbetx在分析中忽略了径向载荷的影响。gydF4y2Ba
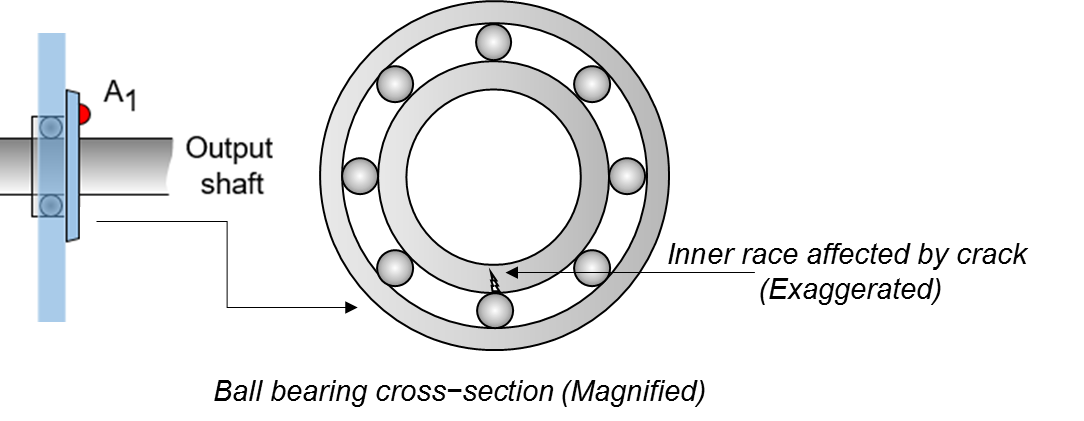
该轴承的节距直径为12厘米,有八个滚动元件。每个滚动单元的直径为2厘米。接触角gydF4y2Ba 是gydF4y2Ba 。在分析轴承振动时,通常将加速度计置于轴承壳上。加速度测量由gydF4y2Ba ,加速度计位于有故障的轴承座上。gydF4y2Ba
定义轴承的参数。gydF4y2Ba
n = 8;gydF4y2Ba%滚动轴承数量gydF4y2Bad = 0.02;gydF4y2Ba轧制件直径%gydF4y2Bap = 0.12;gydF4y2Ba轴承节距直径%gydF4y2BathetaDeg = 15;gydF4y2Ba接触角,单位为度gydF4y2Ba
当滚动单元通过内圈上的局部故障时,就会发生碰撞。这种情况发生的速度是球通过频率-内圈(BPFI)。BPFI可以用gydF4y2Ba
。gydF4y2Ba
bpfi = n*fPin/2*(1 + d/p*cosd(thetaDeg))gydF4y2Ba
bpfi = 104.4889gydF4y2Ba
模型的每个影响作为一个3千赫正弦窗口窗口凯撒窗口。该缺陷对轴承产生了一系列5毫秒的影响。矿坑和矿渣早期的脉冲频率范围很广,可达100 kHz[2]左右。gydF4y2Ba
fImpact = 3000;tImpact = 0:1 / fs: 5 e-3-1 / fs;xImpact =罪(2 *π* fImpact * tImpact)。*凯撒(长度(tImpact), 40) ';gydF4y2Ba
通过将冲击与梳状函数进行卷积使其具有周期性。自gydF4y2Ba 是否更靠近轴承,调整冲击的幅度,使其相对于记录在案的齿轮箱振动信号更加突出gydF4y2Ba 。gydF4y2Ba
xComb = 0(大小(t));xComb(1:圆(fs / bpfi):结束)= 1;xBper = 0.33 * conv (xComb xImpact,gydF4y2Ba“相同”gydF4y2Ba);gydF4y2Ba
想象撞击信号。gydF4y2Ba
figure plot(t,xBper) xlim([0 0.05]) xlabel(gydF4y2Ba“时间(s)”gydF4y2Ba)ylabel (gydF4y2Ba“加速”gydF4y2Ba)标题(gydF4y2Ba“由于局部故障对轴承内圈的影响”gydF4y2Ba)gydF4y2Ba

在健康齿轮箱的振动信号中加入周期性轴承故障。gydF4y2Ba
vnobfaultnoise = vNoFault + randn(size(t))/5;vbfaultnoise = xBper + vNoFault + randn(size(t))/5;gydF4y2Ba
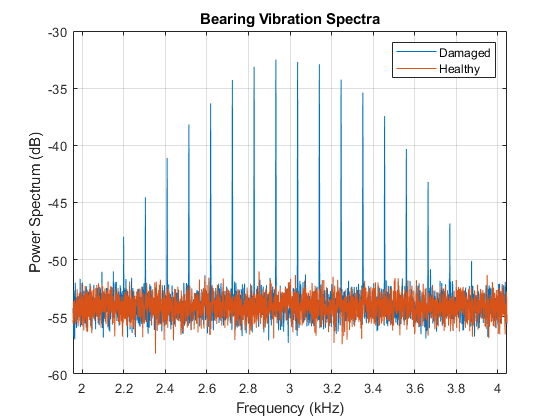
计算信号的频谱。想象低频率的频谱。创建一个网格的前十个BPFI谐波。gydF4y2Ba
pspectrum ([vBFaultNoisy ' vNoBFaultNoisy '], fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,1gydF4y2Ba“FrequencyLimits”gydF4y2Ba传说,10 * bpfi [0]) (gydF4y2Ba“受损”gydF4y2Ba,gydF4y2Ba“健康”gydF4y2Ba)标题(gydF4y2Ba“轴承振动光谱”gydF4y2Ba网格)gydF4y2Ba从gydF4y2BaharmImpact = (0:10) * bpfi;(X, Y) = meshgrid (harmImpact ylim);持有gydF4y2Ba在gydF4y2Ba情节(X / 1000 YgydF4y2Ba”:k”gydF4y2Ba)传说(gydF4y2Ba“健康”gydF4y2Ba,gydF4y2Ba“受损”gydF4y2Ba,gydF4y2Ba“BPFI谐波”gydF4y2Ba) xlim([0 10*bpfi]/1000)保持gydF4y2Ba从gydF4y2Ba
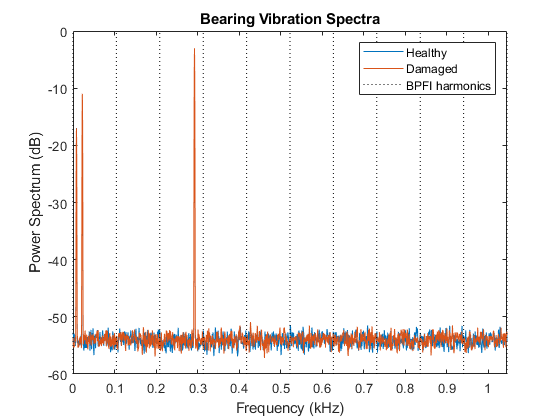
在光谱的低端,轴和网格频率及其顺序掩盖了其他特征。健康轴承的光谱和受损轴承的光谱是无法区分的。这个缺陷强调了隔离轴承故障的方法的必要性。gydF4y2Ba
BPFI取决于比例gydF4y2Ba
接触角的余弦值gydF4y2Ba
。BPFI的一个不合理的表达式意味着轴承的冲击与轴的旋转数不是同步的。的gydF4y2Ba运输安全管理局gydF4y2Ba函数在这种情况下是没有用的,因为它平均了影响。在每个平均段中,影响并不位于同一位置。gydF4y2Ba
这个函数gydF4y2BaenvspectrumgydF4y2Ba(包络谱)进行振幅解调,在提取有关高频影响的信息时很有用。gydF4y2Ba
计算和绘制包络信号及其频谱。比较有无轴承故障信号的包络谱。想象低频率的频谱。创建一个网格的前十个BPFI谐波。gydF4y2Ba
图envspectrum([vnobfaultnoise ' vbfaultnoise '],fs) xlim([0 10*bpfi]/1000) [X,Y] = meshgrid(harmImpact,ylim);持有gydF4y2Ba在gydF4y2Ba情节(X / 1000 YgydF4y2Ba”:k”gydF4y2Ba)传说(gydF4y2Ba“健康”gydF4y2Ba,gydF4y2Ba“受损”gydF4y2Ba,gydF4y2Ba“BPFI谐波”gydF4y2Ba) xlim([0 10*bpfi]/1000)保持gydF4y2Ba从gydF4y2Ba
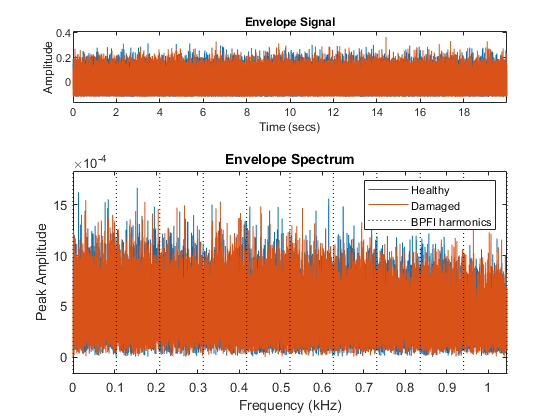
观察BPFI峰在包络谱中并不突出,因为信号被噪声污染了。回想一下,表演gydF4y2Ba运输安全管理局gydF4y2Ba在轴承故障分析中,对噪声进行平均是无用的,因为它同时对冲击信号进行了平均。gydF4y2Ba
的gydF4y2BaenvspectrumgydF4y2Ba函数提供了一个内置的过滤器,可以用来去除感兴趣的频带之外的噪声。在3.125 kHz和4.167 kHz范围内设置一个200阶的带通滤波器。gydF4y2Ba
Fc = 3125;BW = 4167;envspectrum ([vNoBFaultNoisy ' vBFaultNoisy '], fs,gydF4y2Ba“方法”gydF4y2Ba,gydF4y2Ba希尔伯特的gydF4y2Ba,gydF4y2Ba“FilterOrder”gydF4y2Ba,200,gydF4y2Ba“乐队”gydF4y2Ba,[Fc-BW/2 Fc+BW/2]) harmImpact = (0:10)*bpfi;(X, Y) = meshgrid (harmImpact ylim);持有gydF4y2Ba在gydF4y2Ba情节(X / 1000 YgydF4y2Ba”:k”gydF4y2Ba)传说(gydF4y2Ba“健康”gydF4y2Ba,gydF4y2Ba“受损”gydF4y2Ba,gydF4y2Ba“BPFI谐波”gydF4y2Ba) xlim([0 10*bpfi]/1000)保持gydF4y2Ba从gydF4y2Ba
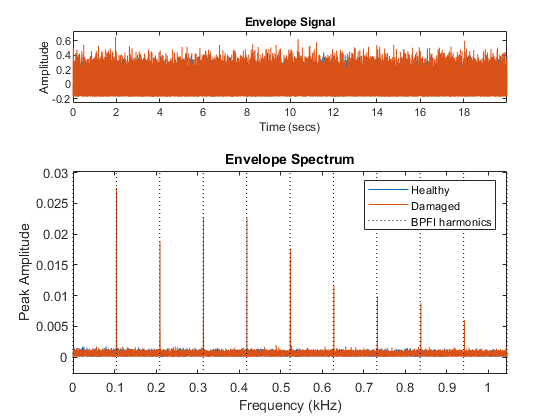
包络谱有效地将通带内容引入基带,因此在1khz以下的BPFI谐波中出现了显著的峰值。这有助于得出结论,即轴承的内圈是潜在的损坏。gydF4y2Ba
在这种情况下,故障轴承的频谱清楚地显示了冲击频率调制的BPFI谐波。在接近3千赫的撞击频率的光谱中观察这一现象。gydF4y2Ba
图pspectrum ([vBFaultNoisy ' vNoBFaultNoisy '], fs,gydF4y2Ba“FrequencyResolution”gydF4y2Ba,1gydF4y2Ba“FrequencyLimits”gydF4y2Ba(bpfi * [10] -10 + fImpact))传说(gydF4y2Ba“受损”gydF4y2Ba,gydF4y2Ba“健康”gydF4y2Ba)标题(gydF4y2Ba“轴承振动光谱”gydF4y2Ba)gydF4y2Ba
观察峰之间的频率间隔等于BPFI。gydF4y2Ba
结论gydF4y2Ba
这个例子使用了时间同步平均来分离振动信号与小齿轮和齿轮。此外,gydF4y2Ba运输安全管理局gydF4y2Ba也衰减了随机噪声。在波动速度(和负载[2])的情况下,可以使用订单跟踪作为前兆gydF4y2Ba运输安全管理局gydF4y2Ba根据轴的旋转角度重新采样信号。在实验条件下还采用了时间同步平均的方法来减弱轴速微小变化的影响。gydF4y2Ba
宽带频率分析可以作为轴承[3]故障分析的良好起点。然而,它的有用性是有限的,当谱在附近的轴承冲击频率包含贡献从其他成分,如齿轮箱齿轮啮合频率的高次谐波。在这种情况下,包络分析是有用的。这个函数gydF4y2BaenvspectrumgydF4y2Ba可用于提取故障轴承的包络信号和频谱,作为轴承磨损和损坏的指标。gydF4y2Ba
参考gydF4y2Ba
谢弗、科尼利厄斯和帕雷什·格达尔。gydF4y2Ba机械振动分析和预测维修。gydF4y2Ba阿姆斯特丹:爱思唯尔出版社,2004年。gydF4y2Ba
兰德尔,罗伯特·邦德。gydF4y2Ba基于振动的状态监测:工业、航空和汽车应用。gydF4y2Ba英国奇切斯特:约翰·威利和儿子们,2011年。gydF4y2Ba
莱西,s . J。gydF4y2Ba轴承振动分析概述。gydF4y2Ba(来自:http://www.maintenanceonline.co.uk/maintenanceonline/content_images/p32 - 42% - 20 - lacey%20paper%20m&am.pdf)gydF4y2Ba
布兰德,安德斯。gydF4y2Ba噪声和振动分析:信号分析和实验程序gydF4y2Ba。英国奇切斯特:约翰·威利和儿子们,2011年。gydF4y2Ba
选择一个网站gydF4y2Ba
选择一个网站来获取可用的翻译内容,并查看本地事件和报价。根据你的位置,我们建议你选择:gydF4y2Ba。gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美洲拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba