振动信号的阶数分析
这个例子展示了如何使用阶数分析来分析振动信号。阶数分析用于量化转速随时间变化的旋转机械中的噪声或振动。一个阶指的是一个频率是参考转速的一定倍数。例如,频率等于电机转动频率的两倍的振动信号对应的阶数为2,同样,频率等于电机转动频率的0.5倍的振动信号对应的阶数为0.5。在这个例子中,确定了大振幅的阶数来研究直升机舱内有害振动的来源。
介绍
本例分析了在直升机机舱内的加速度计在主发动机助跑和滑行时的模拟振动数据。直升机有几个旋转部件,包括发动机、变速箱、主旋翼和尾翼。每个部件相对于主电机以已知的固定速率旋转,每个部件都可能造成不必要的振动。主要振动部件的频率可以与电机的转速相关,以研究高振幅振动的来源。这个例子中的直升机在主旋翼和尾旋翼上都有四个叶片。当直升机旋翼叶片产生振动时,旋翼振动的重要部件往往位于旋翼转动频率的整数倍处。
这个例子中的信号是一个随时间变化的电压,vib,以一定速率采样fs等于500hz。数据包括rpm,涡轮发动机的角速度,矢量t瞬间的时间。每个转子的转子转速与发动机转速的比值存储在变量中mainRotorEngineRatio和tailRotorEngineRatio.
电机转速信号通常由一系列转速计脉冲组成。tachorpm可用于从转速计脉冲信号提取转速信号。tachorpm自动识别两电平转速计波形的脉冲位置,并计算脉冲之间的间隔来估计转速。在本例中,电机转速信号包含转速,rpm,因此不需要转换。
绘制电机转速和振动数据作为时间的函数:
负载helidataVib = Vib - mean(Vib);%拆卸直流组件次要情节(2,1,1)情节(t, rpm)%绘制发动机转速包含(“时间(s)”) ylabel (“发动机转速(RPM)”)标题(发动机转速的次要情节(2,1,2)情节(t, vib)%绘制振动信号包含(“时间(s)”) ylabel (“电压(mV)”)标题(振动加速度计数据的)
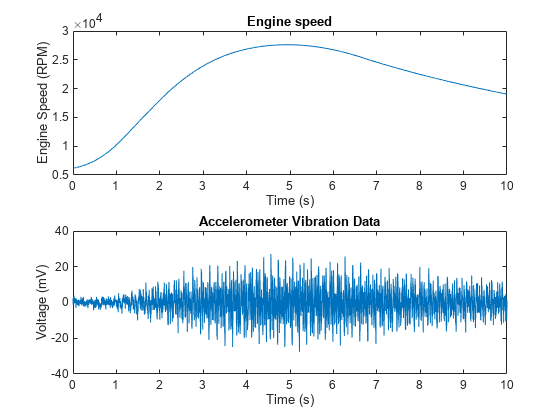
发动机转速在助跑过程中增加,在滑行过程中降低。振动振幅随转速的变化而变化。这种类型的RPM型线是分析旋转机械振动的典型方法。
使用rpm频率图可视化数据
利用该函数可以在频域上显示振动信号rpmfreqmap.这个函数计算信号的短时间傅里叶变换并生成rpm -频率图。rpmfreqmap在省略输出参数时,在交互式绘图窗口中显示地图。
为振动数据生成并可视化rpm -频率图。
rpmfreqmap (vib fs, rpm)

交互式图形窗口产生rpmfreqmap包含一个RPM-频率图,对应于该图的RPM与时间曲线,以及一些可用于量化振动部件的数字指标。地图的振幅默认表示均方根(RMS)振幅。其他振幅选择,包括峰值振幅和功率,可以用可选参数指定。瀑布图菜单按钮生成一个三维视图:
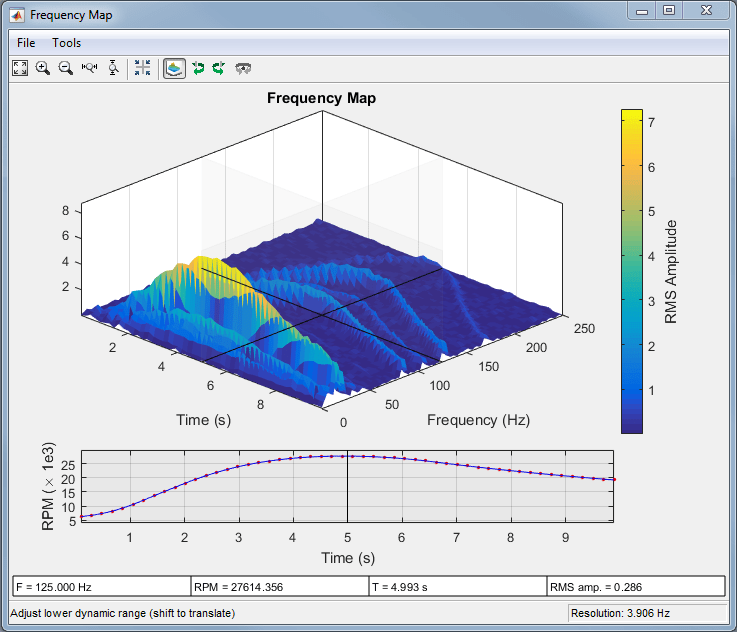
许多轨道在rpm -频率地图有频率增加和减少的电机速度。这表明轨道是电机旋转频率的顺序。在RPM峰值附近有高振幅成分,频率在20和30赫兹之间。十字准线光标可以放置在地图上的这个位置,以查看转速曲线下方的指示框中的频率、RPM值、时间和地图振幅。
默认情况下,rpmfreqmap通过将采样率除以128来计算分辨率。分辨率显示在图的右下角,在本例中为3.906 Hz。默认情况下使用Hann窗口,但也有其他几个窗口可用。
传递一个较小的分辨率值rpmfreqmap以更好地分辨某些频率成分。例如,在峰值转速时,低频部件是不分离的。在低转速值,高振幅轨道似乎混合在一起。
生成分辨率为1hz的RPM-frequency映射来解析这些组件。
rpmfreqmap (vib fs, rpm, 1)
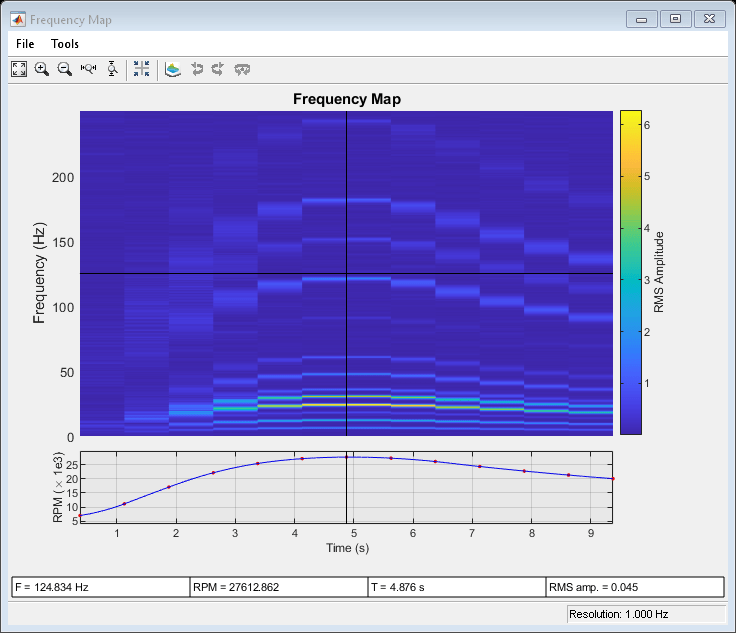
低频成分现在可以解决的峰值RPM,但有明显的涂现时,转速变化更快。振动指令在每个时间窗内随着电机速度的增加或减少而改变频率,产生更宽的频谱轨迹。由于所需的时间窗口较长,这种涂抹效果在分辨率越高时就越明显。在这种情况下,提高光谱分辨率导致在上升和下降阶段增加了污迹伪影。可以生成一个订单映射来避免这种折衷。
使用rpm顺序图可视化数据
这个函数rpmordermap生成顺序与RPM的光谱图,用于顺序分析。该方法通过在恒定的相位增量上对信号进行重采样,为每个阶产生一个平稳的正弦信号,从而消除污迹。采用短时傅里叶变换对重采样信号进行分析。由于每个订单都是参考转速的固定倍数,因此订单映射包含一个作为每个订单RPM函数的直线订单轨迹。
这个函数rpmordermap接受相同的参数rpmfreqmap并在没有输出参数的情况下调用时生成交互式绘图窗口。分辨率参数现在是按顺序指定的,而不是赫兹,并且地图的光谱轴现在是顺序,而不是频率。该函数默认使用一个平顶窗口。
可视化的命令地图的直升机数据使用rpmordermap.指定订单分辨率为0.005订单。
rpmordermap (vib fs, rpm, 0.005)

图中包含了每一个指令的直线轨迹,表明振动发生在电机转速的固定倍数。顺序图可以很容易地将每个光谱分量与电机速度联系起来。与RPM-frequency映射相比,涂抹工件显著减少。
使用平均阶谱确定峰值阶数
接下来,确定订单映射的峰值位置。寻找主旋翼和尾旋翼的整数倍的阶数,在那里这些旋翼会产生振动。这个函数rpmordermap返回映射以及相应的顺序和RPM值作为输出。通过对数据的分析,确定了直升机舱内高振幅振动的阶数。
计算并返回数据的顺序映射。
[map,mapOrder,mapRPM,mapTime]=rpmordermap(vib,fs,rpm,0.005);
下一步,使用orderspectrum计算和绘制…的平均光谱地图.该函数接受由rpmordermap作为输入,并随时间平均。
图orderspectrum(地图,mapOrder)
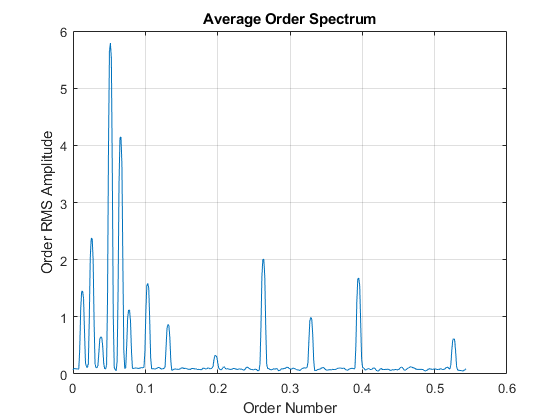
返回平均频谱和呼叫findpeaks返回两座最高山峰的位置。
[规范,specOrder] = orderspectrum(地图,mapOrder);[~, peakOrders] = findpeaks (specOrder规范,“SortStr”,“下”,“NPeaks”2);peakOrders =圆(peakOrders, 3)
peakOrders =2×10.0520 - 0.0660
在图中可以看到两个间隔很近的显性峰在0.05左右。由于振动频率低于电机的转速,所以阶数小于1。
分析一段时间内的订单高峰
接下来,找到峰值阶的振幅作为时间的函数使用ordertrack.使用地图作为输入,并通过调用绘制两个峰值阶的振幅ordertrack没有输出参数。
ordertrack(地图,mapOrder mapRPM、mapTime peakOrders)
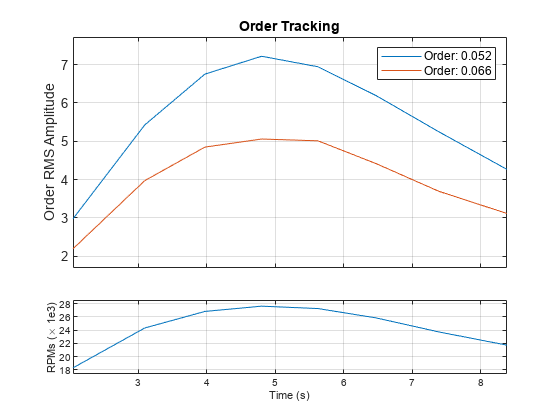
随着电机转速的增加,两个阶的振幅都会增加。虽然在这种情况下订单很容易分开,ordertrack也可以分开交叉订单时,多个RPM信号是存在的。
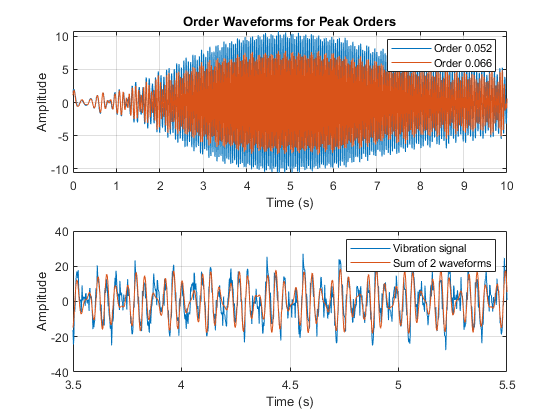
接下来,提取每个峰值阶的时域阶波形orderwaveform.顺序波形可以直接与原始振动信号进行比较,并以音频形式回放。orderwaveform使用Vold-Kalman滤波器提取指定阶数的阶数波形。比较两个峰阶波形与原始信号的和。
orderWaveforms = orderwaveform (vib fs, rpm, peakOrders);helperPlotOrderWaveforms (t orderWaveforms vib)
降低舱室振动
为了识别座舱振动的来源,将每个峰值的顺序与直升机每个旋翼的顺序进行比较。每个转子的顺序等于转子转速与发动机转速的固定比率。
mainRotorOrder = mainRotorEngineRatio;tailRotorOrder = tailRotorEngineRatio;ratioMain = peakOrders / mainRotorOrder
ratioMain =2×14.0310 - 5.1163
ratioTail = peakOrders / tailRotorOrder
ratioTail =2×10.7904 - 1.0032
最高峰值位于主转子转速的4阶,所以振幅最大分量的频率是主转子频率的4倍。主旋翼,它有四个叶片,是这种振动的一个很好的候选源,因为,对于直升机N叶片每转子,振动N乘以转子转速是常见的。同样,第二大部件位于第一个尾桨速度,表明振动可能来自尾桨。由于转子的速度不是由整数因子相关的,第二大峰相对于主转子的速度的阶数不是整数。
在对主旋翼和尾翼进行跟踪和平衡调整后,将收集新的数据集。加载并比较调整前后的阶谱。
负载helidataAfterVib = Vib - mean(Vib);%拆卸直流组件[mapAfter, mapOrderAfter] = rpmordermap (vib, fs, rpm, 0.005);图保存在orderspectrum(地图,mapOrder) orderspectrum (mapAfter, mapOrderAfter)传说(调整前的,调整后的)
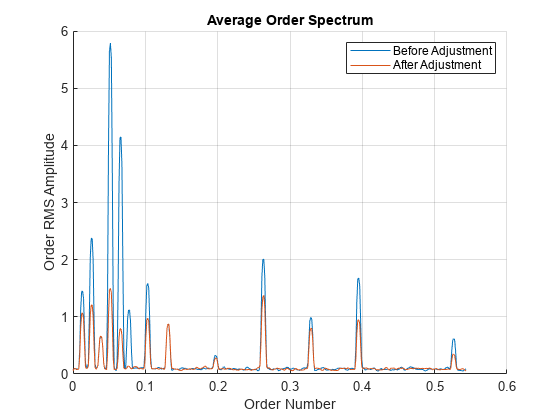
主峰的振幅现在大大降低了。
结论
这个例子使用阶数分析来识别直升机的主旋翼和尾旋翼作为机舱内高振幅振动的潜在来源。首先,rpmfreqmap和rpmordermap用来形象化命令。RPM顺序映射提供了整个RPM范围内的顺序分离,而没有RPM频率映射中存在的模糊工件。rpmordermap是最好的选择,以可视化振动组件在较低的RPM期间,发动机助跑和滑行。
接下来是所使用的示例orderspectrum为了确定峰值订单,ordertrack以形象化的振幅的峰值顺序随时间,和orderwaveform提取峰值阶的时域波形。最大振幅振动分量的阶数出现在主转子转动频率的4倍处,表明主转子叶片存在不平衡。第二大成分发现在转动频率的尾旋翼。对转子的调整降低了振动水平。
参考文献
布兰德,安德斯。噪声和振动分析:信号分析和实验程序.英国奇切斯特:约翰·威利父子公司,2011。
另请参阅
orderspectrum|ordertrack|orderwaveform|rpmfreqmap|rpmordermap
你也可以从以下列表中选择一个网站:
