闭环控制的发动机正时模型
这个例子展示了如何增强一个版本的开环引擎模型使用触发子系统建模发动机定时.这个模型中,sldemo_enginewc,包含一个闭环,并显示了Simulink®模型的灵活性和可扩展性。万博1manbetx在这个增强模型中,控制器的目标是通过一个快速油门执行器来调节发动机速度,这样负载扭矩的变化影响最小。这很容易在Simulink中完成,只需在引擎模型中添加一个离散万博1manbetx时间PI控制器。
闭环模型
我们选择了一种使用比例+积分(PI)控制的控制律。随着工作点的变化,需要积分器来调节稳态节气门,比例项补偿了积分器引入的相位滞后。
方程1




运行仿真
按下模型工具栏上的“播放”按钮来运行模拟。
注意:模型将相关数据记录到一个名为MATLAB工作空间的结构中
sldemo_enginewc_output.记录信号有蓝色指示灯。在Simulink帮助中阅读更多关于信号记录的信息。万博1manbetx

图1:发动机闭环模型及仿真结果
在这个模型中,我们采用了一个离散时间控制器,它适合于微处理器实现。因此,方程1中的积分项必须用离散时间近似来实现。在工业中,控制器的执行是与发动机的曲轴旋转同步的。控制器嵌入在一个由上述阀门定时信号触发的触发子系统中。
“Controller”子系统的详细构造如图2所示。值得注意的是使用了'PID控制器'块。该模块实现了离散时间的比例积分控制系统。注意采样时间设置(内部)在-1.这表明块继承了它的样本时间,在这种情况下,每次子系统被触发时都执行。使这个子系统成为触发子系统的关键组件是如图2底部所示的“Trigger”块。任何子系统都可以通过从Simulink Connections库中拖拽此块的副本到子系统图中来转换为触发的子系统。万博1manbetx

图2:速度控制器子系统
结果
典型仿真结果如图3所示。速度设定值的步骤2000转来3000转在T = 5秒.扭矩扰动与在sldemo_engine,开环模型。注意快速瞬态响应,零稳态误差。几种可供选择的控制器调谐(Ki和Kp)所示。这些可以由用户在MATLAB命令行进行调整。这使得工程师能够理解参数变化的相对影响。
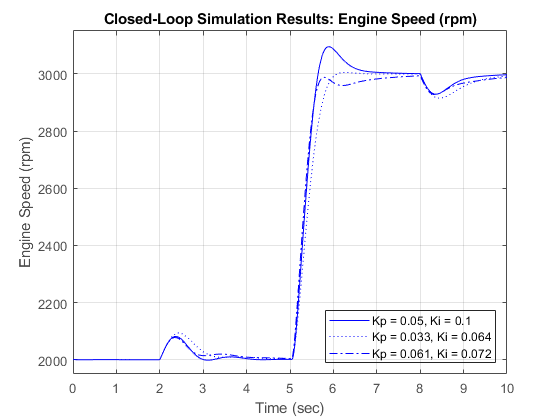
图3:典型的仿真结果
关闭模式
关闭模式。清晰的记录数据。
结论
模拟非线性、复杂系统的能力,比如这里描述的引擎模型,是Simulink的关键特性之一。万博1manbetx仿真的威力在上面模型的展示中是显而易见的。万博1manbetxSimulink保持了模型的保真度,包括精确定时的气缸进气事件,这在创建这种类型的模型中是至关重要的。完整的速度控制系统显示了Simulink的灵活性。万博1manbetx特别是,Simulink建模方法允许中万博1manbetx断驱动引擎速度控制器的快速原型。
参考文献
[1] P.R. Crossley and J.A. Cook, IEEE®International Conference 'Control 91', Conference Publication 332, vol. 2, pp. 921-925, 25-28, 3月,爱丁堡,英国
[2] Simu万博1manbetxlink模型。福特汽车公司开发的Ken Butts。由Paul Barnard, Ted Liefeld和Stan Quinn修改,MathWorks®,1994-7。
[3] J. J. Moskwa和J. K. Hedrick,“实时控制应用的汽车发动机建模”,vol .1987 ACC, pp. 341-346。
[4] B. K. Powell和J. A. Cook,“非线性低频现象发动机建模和分析”,Proc. 1987 ACC,第332-340页。
R. W. Weeks和J. J. Moskwa,“基于Matlab/Simulink的汽车发动机实时控制建模”,1995 SAE Intl。万博1manbetx950417年Cong.纸。
相关的话题
你也可以从以下列表中选择一个网站: