建模的防抱死制动系统
这个例子显示了如何模型的防抱死制动系统(ABS)的简单模型。它模拟的车辆的紧急制动的条件下的动态行为。该模型代表一个单一的轮,其可被复制的次数,以创建用于多轮车辆的模型。
这款机型采用的的Simulink的信号记录功能。万博1manbetx该模型记录信号的MATLAB®工作区,你可以分析和查看。您可以查看代码在sldemo_absbrakeplots.m看到这是如何实现的。
在此模型中,车轮速度在名为一个单独的模型计算出的sldemo_wheelspeed_absbrake。然后,该分量是利用一个“模型”块引用。请注意,无论是顶部模型和参考模型使用可变步长求解,所以Simulink的将跟踪参考模型的过零点。万博1manbetx
分析与物理
具有初始角速度轮旋转时对应于车速制动器之前被应用。我们使用单独的集成来计算车轮角速度和车辆速度。我们使用两种速度来计算滑移,这是由式(1)注意确定我们引入表示为角速度车辆速度(见下文)。

式(1)






从这些表述中,我们看到,滑差为零时,车轮转速和车速都相等,且等于滑时,其中一个车轮被锁定。理想的滑移值是0.2的,这意味着轮的转数等于0.8次转用相同的车辆速度非制动条件下的数量。这最大化了轮胎和道路,并最小化与可用的摩擦的制动距离之间的粘附。
造型
轮胎和路面之间的摩擦系数,亩,是滑的经验函数,被称为μ型滑动曲线。我们通过使MATLAB变量成使用Simulink中的查找表的框图创建亩滑曲线。万博1manbetx该模型乘以摩擦系数,亩,由在车轮上的重量,w ^,以产生摩擦力,FF中,作用在轮胎的圆周上。FF由车辆质量除以用于产生所述车辆减速时,该模型集成以获得车辆速度。
在此模型中,我们使用了一个理想的防抱死制动控制装置中,使用“砰砰”控制基于实际滑移和希望的滑动之间的误差。我们设置所希望的滑移到滑移的在该MU-滑动曲线达到峰值的值,这是最小制动距离的最佳值(见下文注释)。
注意:在实际的车辆中,滑移不能被直接测量,因此该控制算法是不实际的。它在本例中用于说明这样的仿真模型的概念性结构。像这样的模拟的实际工程应用价值是显示控制概念的潜在解决执行中的具体问题之前。
创建的实例的临时目录
在这个例子中,产生的Simulink在当前万博1manbetx工作目录中的文件。如果你不想在这个目录下生成文件,将工作目录更改到合适的目录:
origdir = CD(TEMPDIR);
打开模型
至打开这个模型类型sldemo_absbrake在MATLAB终端(或超链接上点击,如果您使用MATLAB的帮助)。

图1:防抱死制动(ABS)模式
在模型窗口中的“车轮速度”子系统,双击打开它。鉴于车轮打滑,所需的车轮打滑,和轮胎转矩,该子系统计算车轮角速度。

图2:轮速子系统
为了控制制动压力的变化率,该模型中减去从所期望的滑移实际滑移并将该信号馈入开关式控制(+1要么-1取决于误差的符号,参见图2)。此开/关速率通过第一阶滞后表示与所述制动系统的液压管线相关联的延迟。然后,该模型集成了过滤速率,以产生实际的制动压力。所得到的信号,乘以活塞面积和半径相对于所述轮(KF),是施加到车轮上的制动转矩。
该模型由车轮半径在车轮上的摩擦力乘以(RR)给车轮上的路面的加速转矩。制动扭矩中减去,得到在车轮上的净扭矩。由车轮转动惯量除以净转矩,一世,产生车轮加速度,然后将其集成,以提供车轮速度。为了保持轮速和车速阳性,限制积分器在该模型中使用。
在运行模式ABS仿真
按模型工具栏运行模拟的“播放”按钮。您也可以通过执行运行模拟SIM( 'sldemo_absbrake')在MATLAB命令。这种模拟过程中ABS被打开。


图3:基线模拟结果
注:该模型登录一个叫做结构的相关数据,以MATLAB的工作空间
sldemo_absbrake_output。记录的信号具有蓝指示剂。在这种情况下YOUT和SLP登录(看到模型)。了解更多关于在Simulink帮助信号记录。万博1manbetx
图3形象化模拟ABS结果(默认参数)。在图3中示出了第一曲线图的车轮角速度和相应的车辆角速度。该图显示,车轮速度保持车速低于无锁起来,用车速小于15秒变为零。
运行模拟无ABS
欲了解更多有意义的结果,考虑不带ABS的车辆行为。在MATLAB命令行设置模型变量CTRL = 0。此断开来自控制器的滑反馈(参见图1),从而导致最大的制动。结果示于图4。
CTRL = 0;
现在,再次运行模拟。这将模型,而ABS制动。


图4:最大制动仿真结果(制动无ABS)
的制动和ABS制动对战无ABS
在图4的上面的曲线,观察到在车轮约七秒钟锁定。制动,从该点上,在滑动曲线的低于最佳的一部分施用。也就是说,当滑= 1,如在图4的下曲线图看到的那样,轮胎打滑这么多的路面,该摩擦力已经掉落。
这是,也许,在图5中由车辆行进的距离所示的比较而言更有意义,绘制了两种情况。如果没有ABS,大约一个额外的100英尺车辆打滑,需要大约三秒来停止。
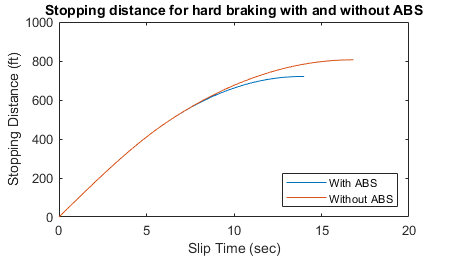
图5:停止硬制动距离有或无ABS
关闭模式
关闭模型。关闭“轮速”子系统。清除记录的数据。改回原来的目录。
CD(origdir);
结论
这个模型展示了如何使用Simulink中模拟ABS控制器的作用下制万博1manbetx动系统。在这个例子中的控制器是理想化的,但你可以在它的位置,以评估该系统的性能使用任何提出的控制算法。您还可以使用的Simulink编码器™使用万博1manbetxSimulink作为算法的快速原型开发的宝贵工具。C代码生成并编译用于控制器硬件来测试的概念在车辆中。这显著减少在开发周期的早期能够实际测试来证明新的想法所需的时间。
对于硬件在半实物制动系统的仿真,可以去除“砰砰”控制器和实时硬件上运行运动方程来模拟车轮和车辆动态。您可以通过生成实时C代码使用Simulink的编码器这种模式做到这一点。万博1manbetx然后,您可以通过它的接口的实时硬件,运行生成的代码测试的实际ABS控制器。在这种情况下,实时模型将轮速发送到控制器,控制器会发出制动动作模型。
您还可以选择从下面的列表中的网站:
