两自由度PID控制,用于定点跟踪
模型描述
这个例子展示了如何调节使用具有设定点的加权二度的自由度PID控制的电动马达的速度。我们在Simulink®中使用PID控制器(2DOF)嵌段如下所示。万博1manbetx


图1:万博1manbetxSimulink模型采用双自由度PID控制直流电机。
要打开这个型号,类型sldemo_pid2dof在MATLAB®终端。
电机为电枢控制直流电机。输入电压控制电机的轴速。电机的方框图如图所示图2。电机承受负载转矩 (0 - 5海里)。
(0 - 5海里)。

图2:电动机的框图。
二自由度PID控制
与此相反的PID控制器块,将PID控制器(2DOF)块提供自由一个额外的自由度,以允许用户在其穿过比例作用信道和微分作用信道权重的设定点。见PID控制器(2DOF)帮助页面或类型医生(PID控制器2自由度)在MATLAB终端中了解更多细节。模型中PID控制器(2DOF)的原理图如下图所示。
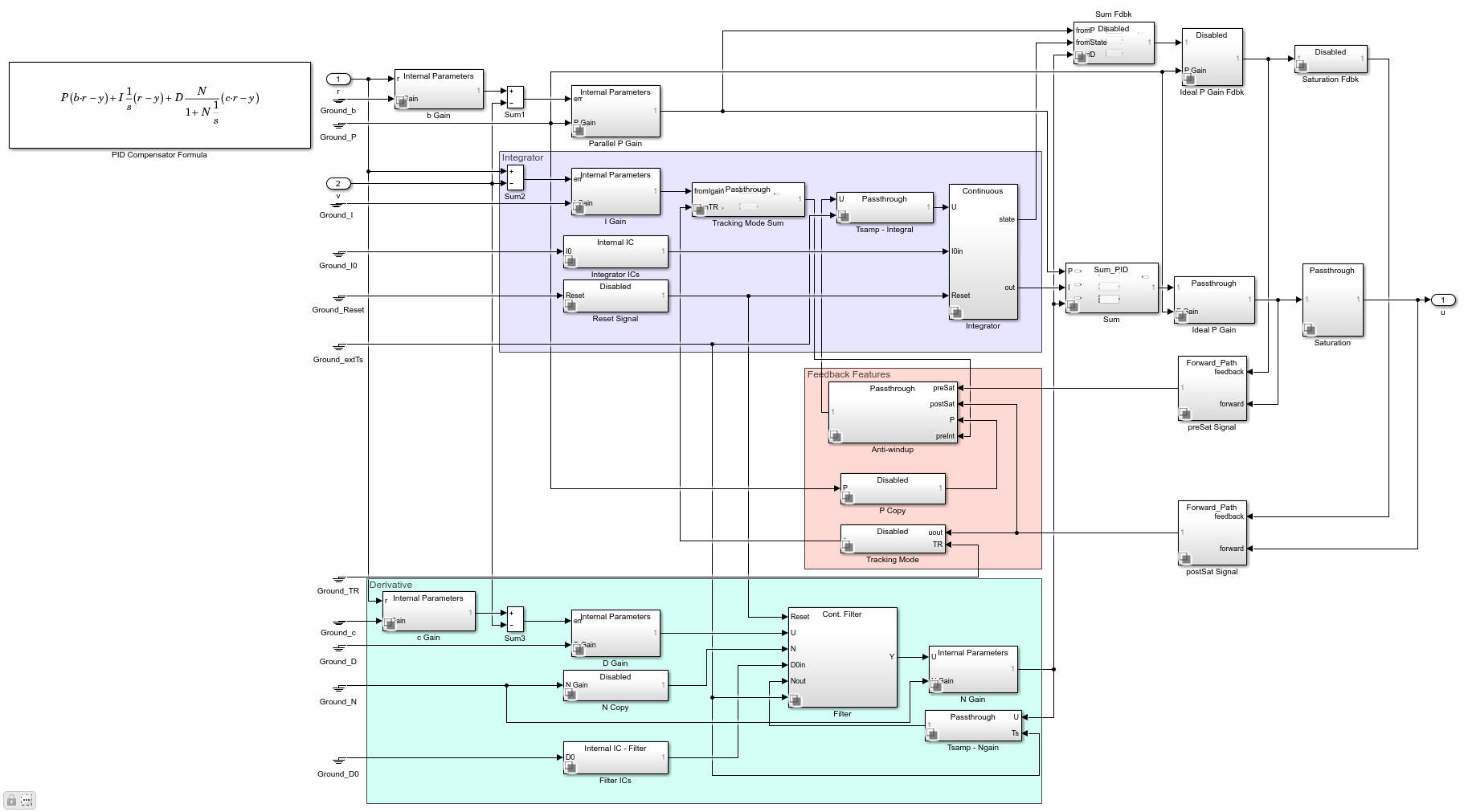
图3:下掩蔽视图将PID控制器(2DOF)的。
如图3所示,比例动作所看到的误差信号为

微分作用得到的信号是

积分作用得到的信号是

一般来说,设定权重c被选择为0是为了防止在设定值发生变化时出现不希望出现的瞬变,这种效应称为导数踢。的定位点b影响控制器的超调性能。一般来说,一个小b价值减少超调。然而,小b值还会导致对设定值更改的响应变慢。有关选择正确设定值的详细信息,请参阅参考[1]。
当 和
和 ,两个自由度的PID控制器的行为与经典的PID控制器相同。
,两个自由度的PID控制器的行为与经典的PID控制器相同。
模拟与b= 1和c= 1
当和,两个自由度的PID控制器的行为与经典的PID控制器相同。模型的控制信号、设定值信号、闭环响应如图4所示。

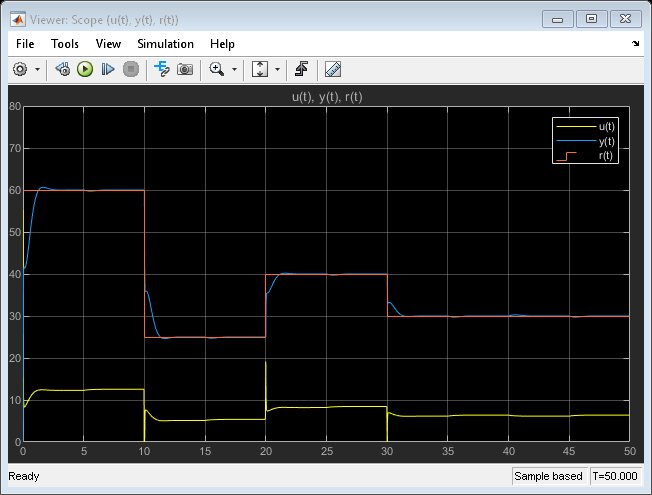
图4:控制信号,设定值与测量输出。
图4清楚地显示了控制信号中的峰值,这是由对设定值变化的积极的比例和导数响应引起的。修改b和c重量可以使这种反应不那么具有攻击性,如下所示。
模拟与b= 0和c= 0
在这种情况下,两个自由度的PID控制器被称为I-PD,其中只有I动作作用于经典的误差信号,而PD动作只作用于测量的输出。

图5:控制信号,设定值与测量输出。
仿真结果清楚地表明,由于设定值的突然变化,控制信号中不存在大的瞬态。
有关如何实现的更多信息,请参见参考[1]b和c是选择。
摘要
Simulink中的PID控制器(2DOF)块支持两个自由度的PID控万博1manbetx制。万博1manbetx该模块可用于跟踪复杂的设定值曲线,调节设定值的突然变化对控制信号瞬态的影响。Simulink®Control 万博1manbetxDesign™的PID调谐器可用于自动调整所有增益(P, I, D, N,b,c)将PID控制器(2DOF)嵌段的。
参考
K. Astrom, T. Hagglund,先进的PID控制, ISA, Research Triangle Park, NC, 2005年8月。
你也可以从以下列表中选择一个网站:
