设计PID控制器使用植物频响带宽附近
对于植物的多种方法来调谐PID控制器此示例示出了一个不能被线性化。在这个例子中,使用频率响应基于PID调谐器来自动表征围绕控制带宽的降压转换器,然后调谐PID控制器的频率响应。
降压转换器型号
降压转换器将直流到直流。在这个例子中该模型使用的开关电源的30V直流电源转换成经调节的DC电源。该转换器利用的MOSFET,而不是理想的开关,以确保导通电阻被正确地表示该设备的建模。从参考电压到测量的电压转换器响应包括MOSFET开关。传统的PID的设计要求系统的从“基准电压”(控制器输出),以测得的电压的线性模型。然而,这里,因为开关,自动在零系统的线性化结果。当一个模型,线性化为零,几个备选方案可供选择:
重新线性系统。线性在不同工作点或模拟快照时间的模型。
确定一个新厂。使用测量或模拟的数据,以确定工厂模式(需要系统辨识工具箱软件)。
基于频率响应调整。使用模拟数据,以获得工厂的频率响应。
在这个例子中,使用频率响应基于PID调谐器估计系统和调整PID控制器的频率响应。对于使用系统识别以识别植物模型的示例,请参见设计PID控制器使用模拟I / O数据。
有关创建降压转换器模型的详细信息,请参阅降压转换器(电气的Simscape)。
open_system('scdbuckconverter')
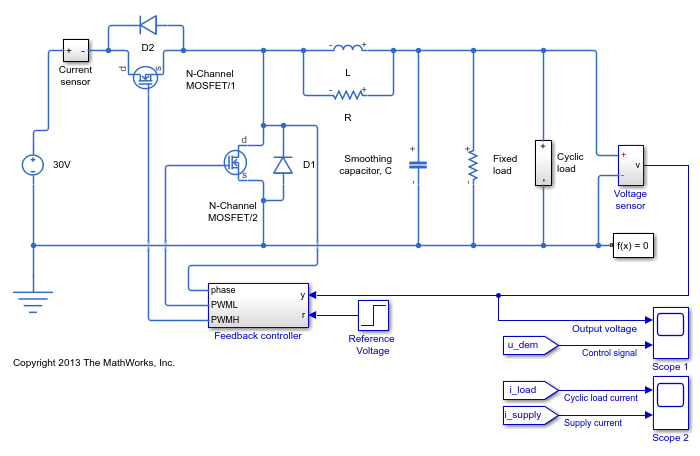
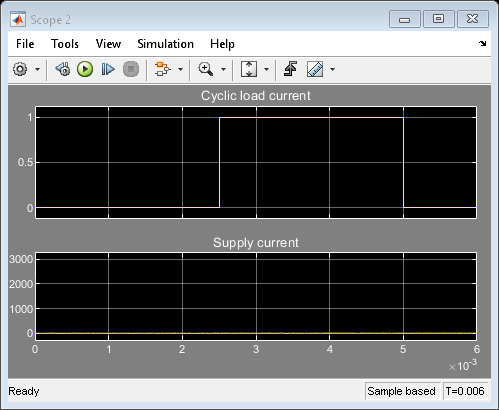
该模型被配置有切换15到在0.004秒25伏,这是从0.0025至0.005秒有源负载电流的参考电压。该控制器初始化过冲和缓慢沉降时间默认的收益和结果。模拟模型显示了系统的欠阻尼和响应速度慢的性质。
SIM('scdbuckconverter')open_system('scdbuckconverter /范围1')open_system('scdbuckconverter /范围2')

对于这个例子,提高了系统的带宽和相位裕度通过表征使用频率响应估计中的系统,以实现更好的性能和调整PID增益。当调谐PID控制器音符降压转换器系统的以下特点:
没有系统进程或传感器噪声
控制器的输入是所述PWM信号
PWM信号被限制(饱和的)在0和1之间
在稳定状态下控制装置的额定输出为0.5
对于降压转换器系统中,希望有具有低上升时间和超调量小的系统。对于这个例子,调谐控制器来实现的250E-6秒的期望的上升时间和小于10%的过冲。
开放频率响应基于PID调谐器
打开反馈控制器子系统,然后打开PID控制器阻止对话框。在选择调整方法, 选择频率响应基于并点击调。该频率响应基于PID调谐器将打开降压转换器控制器。
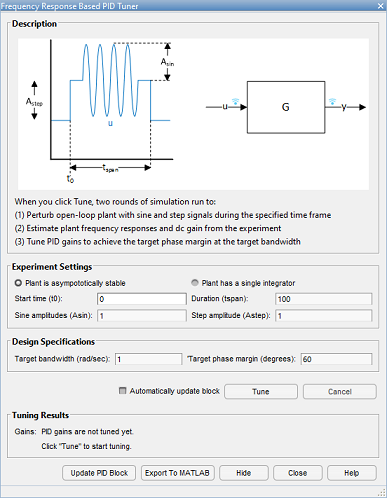
该频率响应基于PID调谐器自动调谐使用两个模拟植物中的PID控制器。第一模拟生成基线应答。第二模拟打破在工厂输入的环路,并与扰动的正弦和步骤信号的植物。调谐器需要两个模拟响应,这消除模型中的任何干扰的影响之间的差异。调谐器然后使用所得到的数据来估计所述植物频率响应。最后,使用估计的频率响应来计算PID增益。
当你打开频率响应基于PID调谐器时,它读取来自PID控制器块参数,以确定PID控制器的结构。这些参数包括:
PID控制器类型(P,I,PI,PID等)
PID控制器表格(并行,理想)
换元积分法,如果适用(向前欧拉,梯形等)
导数过滤法,如果适用(向前欧拉,梯形等)
采样时间(如果适用)
指定实验设定
调谐之前,指定实验的参数将调谐器进行估计植物的频率响应。
开始时间是时间,单位为秒,在该调谐器开始施加所述扰动信号到植物。选择开始时间在植物是在要使用调谐额定工作点。对于这个例子,所述降压转换器具有通过0.002秒脱落的初始瞬态。因此,输入0.002开始时间。
指定持续时间的扰动实验。对于实验的持续时间保守估计是100由目标带宽划分。目标带宽是大约2 /τ,其中τ是所需的上升时间。对于这个例子,期望的上升时间是250E-6秒,这导致每秒8000个弧度目标带宽。在这个例子中为持续时间的保守估计将随后被八千分之百或0.0125秒。选择0.0125秒为持续时间。
在实验过程中,调谐器注入正弦信号到植物在4个频率,1/3,1,3,10] ,其中是带宽您指定调整目标。指定注入正弦波的幅度正弦振幅领域。
,其中是带宽您指定调整目标。指定注入正弦波的幅度正弦振幅领域。
选择具有该系统的本底噪声级以上,并且不会使系统饱和幅度。在这个例子中有系统无噪音考虑。然而,控制器输出(PWM的占空比)被限制为[0 1]和控制器在稳定状态下的标称输出为0.5。为了保持这些限制范围内,指定0.1的正弦振幅。指定标值使用在所有四个频率相同的幅度。
对于一个渐近稳定植物,调谐器也注入一个阶跃信号来估计植物直流增益。选择基于你用来选择正弦振幅相同的考虑这一步信号的幅度。对于这个例子,在输入0.1步进幅度现场为好。
指定设计目标
最后,指定调整的目标带宽。如前所述,目标带宽是每秒8000个弧度。在输入8000带宽领域。默认目标相位裕度,60度,对应于约10%或更好的过冲。
调谐PID控制器和验证结果
请点击调以开始降压转换器和调谐PID控制器的两个模拟。
在调谐过程的结束时,调谐增益,估算相位裕量和额定输入植物中显示频率响应基于PID调谐器在对话框中调整结果部分。检查估计的相位裕度,以确保它是靠近目标相位裕度。

为了验证结果使用模拟调谐PID收益模型。要做到这一点,更新PID控制器块的收益。请点击更新PID功能块写调谐的增益设置到PID控制器块。然后,仿真模型,确认PID控制器的性能。

bdclose('scdbuckconverter')
您还可以选择从下面的列表中的网站: