时域规范
这个例子给出了一个旅游可用的时间域要求的控制系统调谐systune或者looptune.
背景
的systune和looptune命令调整固定结构控制系统的参数,经过各种时间和频域要求。的TuningGoal.包是这种设计需求的存储库。
步骤命令后面
的TuningGoal.steptracking.要求规定了调谐闭环系统应如何响应一个阶跃输入。您可以根据一阶或二阶特征或作为显式参考模型指定所需的响应。当实际响应和期望响应之间的相对间隙在最小二乘意义上足够小时,就满足了这一要求。例如,
R1 = TuningGoal。StepTracking (“r”,“y”, 0.5);
规定闭环响应r来y应该表现得像时间常数为0。5的一阶系统,而
r2 = tuninggoal.steptracking(“r”,“y”zpk ([1 - 2], 1));
指定二阶非最小相行为。使用viewGoal可视化所需的响应。
viewGoal (R2)

此需求可用于调优SISO和MIMO步进响应。在MIMO情况下,要求确保每个输出以最小的交叉耦合跟踪相应的输入。
步骤扰动拒绝
的TuningGoal。年代tepRejection要求规定了调谐闭环系统应如何响应一个阶跃扰动。您可以指定响应振幅、稳定时间和振荡阻尼的最坏情况值。例如,
r1 = tuninggoal.steprejectile(' d ',“y”0.5, 0.3, 2);
限制振幅
为0.3时,沉降时间为2个时间单位,且阻尼比最小为0.5。使用viewGoal来查看相应的时间响应。
viewGoal (R1)

您还可以使用“参考模型”来指定所需的响应。注意,当可能更好的干扰抑制时,实际和指定的响应可能大大不同。使用TuningGoal。瞬态需要关闭匹配时的要求。为获得最佳结果,调整参考模型的增益,以便实际和指定的响应具有类似的峰值幅度(参见TuningGoal。年代tepRejection文档详细信息)。
瞬态响应匹配
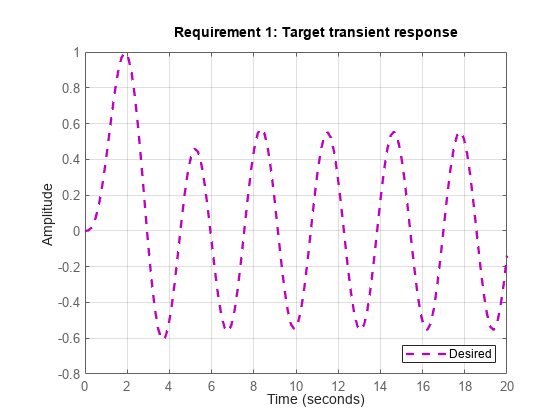
的TuningGoal。瞬态要求指定一个特定输入信号的瞬态响应。这是泛化TuningGoal.steptracking.要求。例如,
r1 = tuninggoal.transient(“r”,“y”,tf(1,[1 1 1]),“冲动”);
要求调优的响应来自 来 就像参考模型的脉冲响应 .
viewGoal (R1)

输入信号可以是一个脉冲,一个阶跃,一个斜坡,或一个更一般的信号,建模为一些输入整形滤波器的脉冲响应。例如具有频率的正弦波 的脉冲响应可以被建模为 .
w0 = 2;F = tf(w0^2,[1 0 w0^2]);%输入整形滤波器R2 = TuningGoal。瞬态(“r”,“y”特遣部队([1 1 1]),F);viewGoal (R2)
LQG设计
使用TuningGoal。LQG要求建立一个线性二次高斯目标来调整控制系统参数。这一目标适用于任何控制结构,而不仅仅是经典的LQG控制观测器结构。例如,考虑图2中的简单PID循环
和
单位方差干扰和噪声输入,和
和
低通和高通滤波器,用于造型干扰和噪声谱内容。

图2:调节回路。
调节 ZEROTIZY,您可以使用以下LQG标准:
积分的第一项惩罚
从零,第二任期惩罚控制努力。使用systune,可以调整PID控制器,使成本最小化
.为此,使用LQG需求
Qyu = diag([1 0.05]);y^2和u^2的%权重R4 = TuningGoal。LQG ({' d ','n'}, {“y”,“u”} 1 Qyu);
另请参阅
TuningGoal。LQG|TuningGoal。年代tepRejection|TuningGoal.steptracking.|TuningGoal。瞬态
相关话题
- 频域规范(控制系统工具箱)
你也可以从以下列表中选择一个网站: