主要内容
具有参考跟踪和植物不确定性的PID整定
这个例子展示了如何使用Simulink®Design Opt万博1manbetximization™跟踪参考信号,并优化植物模型中的不确定性响应。设备模型由设备传递函数组成,包括饱和块和速率限制块。要查看结果,请执行以下步骤。
打开pidtrack_demo使用下面的命令建模并运行模拟。仿真产生一个未优化的阶跃响应和优化的初始数据。
open_system (“pidtrack_demo”)
![]()
双击范围块以查看未优化的阶跃响应。

双击阶跃响应规范阻塞以查看工厂响应的限制,包括上升时间、稳定时间和最大超调量。
双击参考跟踪规范块来查看控制器必须跟踪的参考信号。
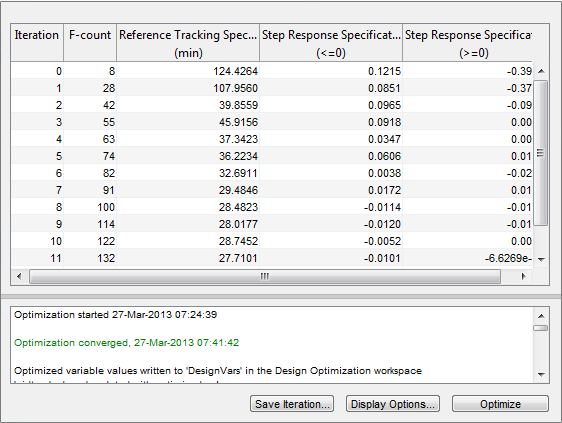
你可以启动响应优化器使用应用程序在Simulink工具条万博1manbetx中的菜单,或sdotool在MATLAB®命令。中的启动预配置的优化任务响应优化器首先打开模型,然后双击模型底部的橙色块。从响应优化器,按下图模型反应按钮来模拟模型并显示初始设计满足设计要求的程度。

图中的实线表示不考虑不确定性的植物响应,虚线表示不确定响应。
按下启动优化优化按钮响应优化器.
调整后的参数就是PID控制器增益Kp,Ki,Kd.设备参数a1和a2仅在10%(不确定性)之内。
优化的目的是使标称值(实线)和最小/最大值(虚线)的实际响应和理想响应之间的差距最小化a1和a2.
地块被更新,以表明设计要求已经满足。

%关闭模型。bdclose (“pidtrack_demo”)
你也可以从以下列表中选择一个网站: