倒立摆控制器调优
这个例子展示了如何使用仿真软件®设计优化™优化一个倒立摆的控万博1manbetx制器。倒立摆是一个购物车,购物车的运动控制。控制器的比例、积分和前馈增益调到极限摆角变化和应对一步车最佳位置的变化。
打开pendulum_demo使用下面的命令和运行仿真模型。仿真产生实现倒立摆的位置和角度,优化的初始数据。动画窗口显示购物车和倒立摆角位置。
open_system (“pendulum_demo”)
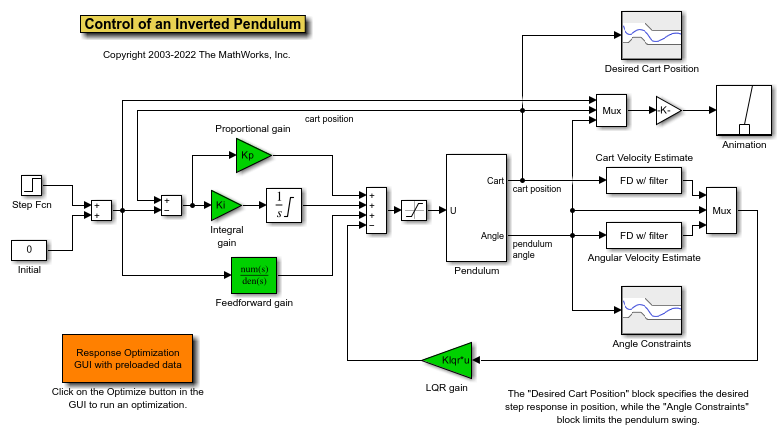
双击预定车位置块查看限制小车倒立摆的位置。
双击角约束块对倒立摆的角度视图约束。
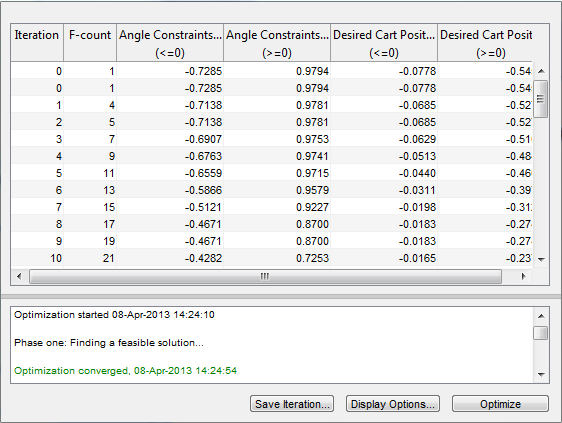
你可以启动响应优化器使用应用程序菜单在仿真软件将来发布,万博1manbetx或sdotool在MATLAB®命令。您可以启动一个预先配置的优化任务响应优化器首先打开模型并通过双击橙色块模型的底部。从响应优化器,按下图模型反应按钮来模拟模型和显示最初的设计如何满足设计要求。

我们开始优化按优化按钮响应优化器。故事情节表明更新设计要求已经满足。

%关闭模式。bdclose (“pendulum_demo”)