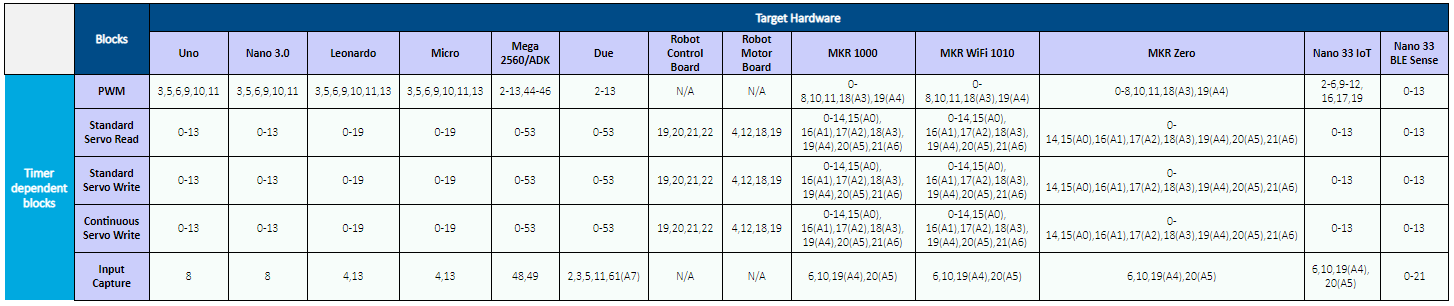
引脚映射arduino.计时器依赖块
万博1manbetx®万博1manbetxArduino支持包®硬件万博1manbetx支持这些块,其操作取决于Arduino硬件板的计时器。
要查看这些块的PIN映射,请单击查看PIN地图在“块参数”对话框中。这将打开Arduino引脚映射表。例如,要查找您可以使用的销标准伺服写入块为uno板,寻找标准伺服写入下面的条目块柱垂直下来和uno.板水平横跨。p0.-13.可用于uno板。
Arduino计时器上的冲突引脚配置
一次使用一个Arduino计时器一次只有一个块功能。例如,如果您的模型使用PWM.块,您无法连接输入捕获和伺服块到同一计时器。同样,如果您的模型使用输入捕获块,您无法连接PWM.和伺服块到同一计时器。并且,如果您的模型使用伺服块,则无法连接PWM.和输入捕获块到同一计时器。
如果您的Simu万博1manbetxlink模型利用多个定时器依赖块,则可以使用下表来避免计时器冲突。
| arduino板类型 | Arduino Timer. | 用于输入捕获块的Arduino引脚连接 | 用于PWM块的Arduino引脚连接 | 伺服块使用冲突 |
|---|---|---|---|---|
| Uno,Nano 3.0 | 定时器1 | 8. |
9.那10. |
设置1 |
| Mega 2560 / Adk | 定时器5. | 48. |
44.那45.那46. |
设置1 |
| 定时器1 | 11.那12. |
纳 | 设置2 | |
| 定时器3. | 2那3.那5. |
纳 | 设置3. | |
| 定时器4. | 49. |
6.那7.那8. |
设置4. | |
| 莱昂纳多,机器人控制板,机器人电机板,微型 | 定时器1 | 4. |
9.那10. |
设置1 |
| 定时器4. | 13. |
6.那13. |
纳 | |
| MKR 1000,MKR WiFi 1010,MKR零 | 定时器TCC0. | 10. |
6.那7.那11.那18.(A3),19.(A4) |
纳 |
| 定时器TCC1. | 6. |
2那3. |
纳 | |
| 定时器TCC2. | 19.(A4) |
8. |
纳 | |
| 定时器TC3. | 20. |
0.那1 |
设置1 | |
| 定时器TC4. | 10. |
纳 | ||
| 纳米33 IOT. | 定时器TCC0. | 10. |
5.那6.那9.那10.那16.那17. |
纳 |
| 定时器TCC1. | 6. |
4. |
纳 | |
| 定时器TCC2. | 19. |
11. |
纳 | |
| 定时器TC3. | 20. |
12. |
纳 | |
| 定时器TC4. | 19. |
设置1 | ||
| 到期的 | 定时器TC0_CH0. | 2 |
2那13. |
纳 |
| 定时器TC2_CH2. | 11. |
纳 | 设置4. |
考虑不同Arduino板的这些示例组合:
对于Arduino Leonardo Board,如果您的Simulink模型使万博1manbetx用连接到引脚的输入捕获块,则无法将PWM块连接到引脚9和10,并且您无法在模型中使用伺服块。
对于Arduino Nano 33 IOT板,如果您的Simulink模型使用连接到引万博1manbetx脚10的输入捕获块,则无法将PWM块连接到PIN编号5,6,9,10,16和17并且不能使用模型中的伺服块。
对于Arduino Mega 2560 / ADK板,如果您的Simulink模型使用连接万博1manbetx到引脚11或12的PWM块,则无法在模型中使用伺服块。
也可以看看
您还可以从以下列表中选择一个网站: