建立与目标硬件的CAN通信
介绍如何建立与C2000目标硬件的CAN通信。
按照以下步骤在目标硬件和主机计算机之间建立CAN通信。
确保Vector Hardware已正确安装在Windows中®设备管理器。

从。下载并安装最新版本的Vector XL库
矢量网站.安装库后,将vxlapi64.dll文件从安装文件夹(例如C:\Softwares\Vector_Driver_Setup_9_3_0\Common)复制到windows root\system32文件夹。根据Windows操作系统不同,此文件夹名称可能不同(例如C:\Windows\Sys32)。
在vector驱动安装中运行vcanconf.exe。
右键单击应用程序并选择“添加应用程序”。
将应用程序命名为“MATLAB”并保持默认设置。
右键单击第一个CAN小猪硬件设备,选择MATLAB,并选择CAN 1。
再次右键单击第一个CAN小猪硬件设备,单击默认波特率改变波特。
波特必须和你的Simulink匹配万博1manbetx®模型可以波特,你可以改变使用目标首选项设置。
的矢量硬件配置窗口显示。

打开模型。进入“配置参数”对话框,选择需要配置的参数硬件板并验证CAN波特率。默认波特率为
1兆比特/秒.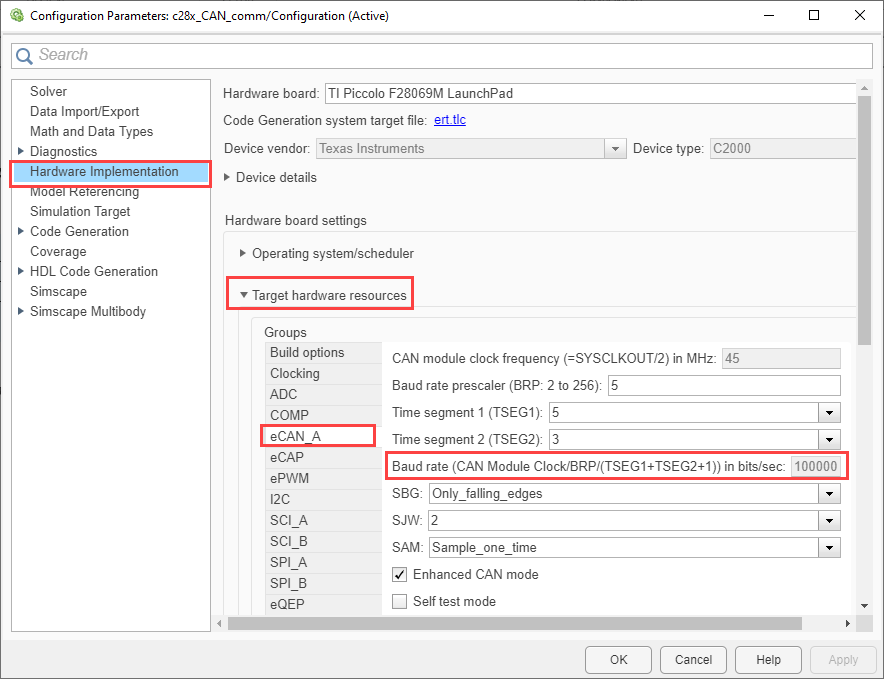
现在已经在主机计算机和C2000目标硬件之间建立了CAN通信。要了解有关使用eCAN的CAN通信的更多信息,请参见可以使用eCAN块进行通信吗



您也可以从以下列表中选择一个网站: