实心轴悬架钢板弹簧gydF4y2Ba
实心轴悬架钢板弹簧gydF4y2Ba
库:gydF4y2Ba
车辆动力学Blockset /暂停gydF4y2Ba
描述gydF4y2Ba
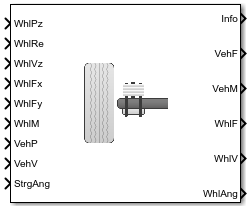
的gydF4y2Ba实心轴悬架钢板弹簧gydF4y2Ba块实现了固体轴悬架钢板弹簧的多个轴与多个车轮每轴。gydF4y2Ba
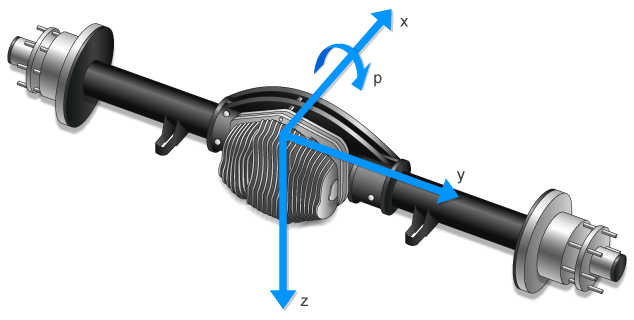
块模型悬架合规、阻尼和几何效应作为车轮位置和速度的函数,与axle-specific合规和阻尼参数。使用轮子的位置和速度,块计算垂直轮位置和车辆和环上的悬浮力。块使用Z-down (SAE J670中定义)和固体轴坐标系统。这里显示,固体轴坐标系统是符合Z-down车辆坐标系,用gydF4y2BaxgydF4y2Ba设在车辆运动的方向前进。gydF4y2Ba
| 为每一个gydF4y2Ba | 您可以指定gydF4y2Ba |
|---|---|
轴gydF4y2Ba |
|
轮gydF4y2Ba |
|
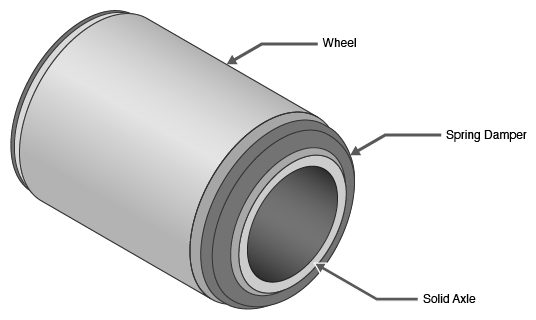
块包含储能弹簧、耗能阻尼器元素。块还存储能量通过轴转动角加速度和轴质心纵向和横向加速度。gydF4y2Ba
这个表总结了块的车辆参数设置:gydF4y2Ba
两个轴gydF4y2Ba
两个轮子/轴gydF4y2Ba
转向角输入两个轮子前轴gydF4y2Ba
| 参数gydF4y2Ba | 设置gydF4y2Ba |
|---|---|
| 数量的轴,NumAxlgydF4y2Ba |
|
轮子的轴数,NumWhlsByAxlgydF4y2Ba |
|
| 引导轴使轴,StrgEnByAxlgydF4y2Ba |
|
块使用轮数,gydF4y2BatgydF4y2Ba索引输入和输出信号。这个表总结了车轮、车轴和相应车轮的车辆数量:gydF4y2Ba
两个轴gydF4y2Ba
两个轮子/轴gydF4y2Ba
| 轮gydF4y2Ba | 轴gydF4y2Ba | 轮数gydF4y2Ba |
|---|---|---|
| 前左gydF4y2Ba | 前面gydF4y2Ba | 1gydF4y2Ba |
| 前右gydF4y2Ba | 前面gydF4y2Ba | 2gydF4y2Ba |
| 后离开gydF4y2Ba | 后gydF4y2Ba | 1gydF4y2Ba |
| 后正确的gydF4y2Ba | 后gydF4y2Ba | 2gydF4y2Ba |
悬挂合规和阻尼gydF4y2Ba
块使用一个线性弹簧和阻尼器模型垂直动态车辆的悬架系统的影响和车轮。具体来说,布洛克:gydF4y2Ba
使用gydF4y2Ba |
计算gydF4y2Ba |
|---|---|
|
|
计算轴的动态,块实现了这些方程。块忽视的影响:gydF4y2Ba
横向和纵向平移速度。gydF4y2Ba
角速度的纵向和横向轴。gydF4y2Ba
净轴质心垂直力是车轮和车轴上的悬浮力。gydF4y2Ba
净力矩的轧辊轴线固体轴悬挂装置挂载点坐标的悬架和车轮。gydF4y2Ba
块参数提供跟踪和悬架挂载点坐标。gydF4y2Ba
块使用欧拉角变换跟踪和悬架位移、速度和加速度的车辆坐标系。gydF4y2Ba
计算悬浮力应用于车辆,块实现了这个方程。gydF4y2Ba
悬浮力和力矩应用于车辆等于悬浮力和力矩是应用于轮。gydF4y2Ba
计算垂直力应用于悬架在车轮位置、块实现了一个硬弹簧减震器,如图所示。gydF4y2Ba
块使用这个方程。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| FgydF4y2BawzgydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2BawzgydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于轮在轴上gydF4y2Ba |
| FgydF4y2Ba的天气gydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2Ba的天气gydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于轮在轴上gydF4y2Ba |
| FgydF4y2Ba王寅gydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2Ba王寅gydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于轮在轴上gydF4y2Ba |
| FgydF4y2BavzgydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2BavzgydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于车辆车轴上gydF4y2Ba |
| FgydF4y2BavxgydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2BavxgydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于车辆车轴上gydF4y2Ba |
| FgydF4y2BavgydF4y2Ba一个tgydF4y2Ba,gydF4y2Ba米gydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 悬浮力和力矩应用于车辆车轴上gydF4y2Ba |
| FgydF4y2Baz0gydF4y2Ba一个gydF4y2Ba | 垂直悬挂弹簧预加载力应用于轴上的轮子gydF4y2Ba |
| kgydF4y2BazgydF4y2Ba一个gydF4y2Ba | 垂直弹簧常数应用于轴上的轮子gydF4y2Ba |
| 克瓦语gydF4y2BazgydF4y2Ba | 轮轴接口合规常数gydF4y2Ba |
| 米gydF4y2BahsteergydF4y2Ba一个gydF4y2Ba | 转向角为车轮垂直力边坡应用于轮架轴gydF4y2Ba |
| δgydF4y2Ba引导gydF4y2Ba一个tgydF4y2Ba | 转向角输入轴gydF4y2Ba |
| cgydF4y2BazgydF4y2Ba一个gydF4y2Ba | 垂直阻尼常数应用于轴上的轮子gydF4y2Ba |
| 公告gydF4y2BazgydF4y2Ba | 轮轴界面阻尼常数gydF4y2Ba |
| 再保险gydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 有效的轴轮半径gydF4y2Ba |
| FgydF4y2BazhstopgydF4y2Ba一个tgydF4y2Ba | 在轴垂直hardstop力gydF4y2Ba |
| FgydF4y2BazaswygydF4y2Ba一个tgydF4y2Ba | 在轴垂直anti-sway力gydF4y2Ba |
| 澳洲公平工作委员会gydF4y2Baz0gydF4y2Ba | 轮轴接口合规常数gydF4y2Ba |
| zgydF4y2BavgydF4y2Ba一个tgydF4y2Ba,gydF4y2BażgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 在轴车辆位移和速度gydF4y2Ba |
| zgydF4y2BawgydF4y2Ba一个tgydF4y2Ba,gydF4y2BażgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移和速度gydF4y2Ba |
| xgydF4y2BavgydF4y2Ba一个tgydF4y2Ba,gydF4y2BaẋgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 在轴车辆位移和速度gydF4y2Ba |
| xgydF4y2BawgydF4y2Ba一个tgydF4y2Ba,gydF4y2BaẋgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移和速度gydF4y2Ba |
| ygydF4y2BavgydF4y2Ba一个tgydF4y2Ba,gydF4y2BaẏgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 在轴车辆位移和速度gydF4y2Ba |
| ygydF4y2BawgydF4y2Ba一个tgydF4y2Ba,gydF4y2BaẏgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移和速度gydF4y2Ba |
| HgydF4y2Ba一个tgydF4y2Ba | 在轴悬挂高度gydF4y2Ba |
| 再保险gydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 有效的轮在轴半径gydF4y2Ba一个gydF4y2Ba,轮gydF4y2BatgydF4y2Ba |
Hardstop部队gydF4y2Ba
hardstop反馈力,gydF4y2BaFgydF4y2BazhstopgydF4y2Ba一个tgydF4y2Ba,块适用取决于悬架是压缩或扩展。块适用力:gydF4y2Ba
在压缩,当悬挂压缩超过指定的最大距离gydF4y2Ba悬架最大高度、HmaxgydF4y2Ba参数。gydF4y2Ba
在扩展,当悬挂扩展大于指定的最大扩展gydF4y2Ba悬架最大高度、HmaxgydF4y2Ba参数。gydF4y2Ba
计算力,阻止使用刚度基于双曲正切和指数扩展。gydF4y2Ba
外倾角、连铸机和脚趾的角度gydF4y2Ba
计算曲面、连铸机和脚趾角度、块使用线性函数的悬挂高度和转向角。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| ξgydF4y2Ba一个tgydF4y2Ba | 在轴的车轮外倾角gydF4y2Ba |
| ηgydF4y2Ba一个tgydF4y2Ba | 后倾角的轮子在轴上gydF4y2Ba |
| ζgydF4y2Ba一个tgydF4y2Ba | 脚趾角轮在轴上gydF4y2Ba |
| ξgydF4y2Ba0一个gydF4y2Ba,gydF4y2BaηgydF4y2Ba0一个gydF4y2Ba,gydF4y2BaζgydF4y2Ba0一个gydF4y2Ba | 名义悬挂轴曲面,施法者,脚趾角度,分别在零转向角gydF4y2Ba |
| 米gydF4y2BahcambergydF4y2Ba一个gydF4y2Ba,gydF4y2Ba米gydF4y2BahcastergydF4y2Ba一个gydF4y2Ba,gydF4y2Ba米gydF4y2BahtoegydF4y2Ba一个gydF4y2Ba | 外倾角、连铸机和脚趾角度,分别与悬架高度斜坡轴gydF4y2Ba |
| 米gydF4y2BacambersteergydF4y2Ba一个gydF4y2Ba,gydF4y2Ba米gydF4y2BacastersteergydF4y2Ba一个gydF4y2Ba,gydF4y2Ba米gydF4y2BatoesteergydF4y2Ba一个gydF4y2Ba | 外倾角、连铸机和脚趾角度,分别为轴与转向角坡gydF4y2Ba |
| 米gydF4y2BahsteergydF4y2Ba一个gydF4y2Ba | 转向角与轴垂直力的斜率gydF4y2Ba |
| δgydF4y2Ba引导gydF4y2Ba一个tgydF4y2Ba | 转向角输入轴gydF4y2Ba |
| zgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 车辆在轴位移gydF4y2Ba |
| zgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移gydF4y2Ba |
操舵角gydF4y2Ba
可选地,使用gydF4y2Ba引导轴使轴,StrgEnByAxlgydF4y2Ba参数输入车轮的转向角度。计算车轮的转向角度,块偏移量输入转向角度的线性函数悬挂高度。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| 米gydF4y2BatoesteergydF4y2Ba一个gydF4y2Ba | 轴gydF4y2Ba |
| 米gydF4y2BahsteergydF4y2Ba一个gydF4y2Ba | 轴gydF4y2Ba |
| 米gydF4y2BahtoegydF4y2Ba一个gydF4y2Ba | 轴gydF4y2Ba |
| δgydF4y2BawhlsteergydF4y2Ba一个tgydF4y2Ba | 轴的车轮转向角gydF4y2Ba |
| δgydF4y2Ba引导gydF4y2Ba一个tgydF4y2Ba | 转向角输入轴gydF4y2Ba |
| zgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 车辆在轴位移gydF4y2Ba |
| zgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移gydF4y2Ba |
电力和能源gydF4y2Ba
为每个轴块计算这些悬浮的特征,gydF4y2Ba一个gydF4y2Ba轮,gydF4y2BatgydF4y2Ba。gydF4y2Ba
| 计算gydF4y2Ba | 方程gydF4y2Ba |
|---|---|
耗散功率,gydF4y2BaPgydF4y2BasuspgydF4y2Ba一个tgydF4y2Ba |
|
吸收能量,gydF4y2BaEgydF4y2BasuspgydF4y2Ba一个tgydF4y2Ba |
|
悬挂高度,gydF4y2BaHgydF4y2Ba一个tgydF4y2Ba |
|
轮架中心距离轮胎/道路界面gydF4y2Ba |
|
方程使用这些变量。gydF4y2Ba
| 米gydF4y2BahsteergydF4y2Ba一个gydF4y2Ba | 转向角为车轮垂直力边坡应用于轮架轴gydF4y2Ba |
| δgydF4y2Ba引导gydF4y2Ba一个tgydF4y2Ba | 转向角输入轴gydF4y2Ba |
| 再保险gydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轴gydF4y2Ba |
| FgydF4y2Baz0gydF4y2Ba一个gydF4y2Ba | 垂直悬挂弹簧预加载力应用于轴上的轮子gydF4y2Ba |
| zgydF4y2BawtrgydF4y2Ba一个tgydF4y2Ba | 轮架中心距离轮胎/道路界面,沿着vehicle-fixedgydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| zgydF4y2BavgydF4y2Ba一个tgydF4y2Ba,gydF4y2BażgydF4y2BavgydF4y2Ba一个tgydF4y2Ba | 在轴车辆位移和速度gydF4y2Ba |
| zgydF4y2BawgydF4y2Ba一个tgydF4y2Ba,gydF4y2BażgydF4y2BawgydF4y2Ba一个tgydF4y2Ba | 轮在轴位移和速度gydF4y2Ba |
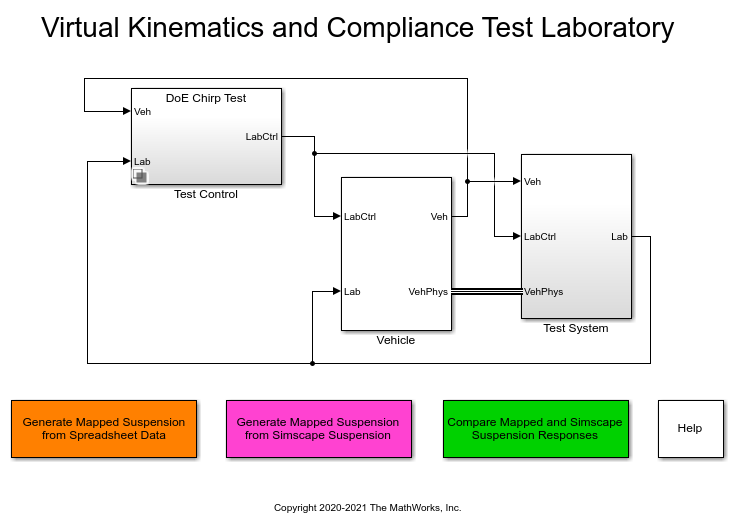
例子gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
引用gydF4y2Ba
[1]Gillespie,托马斯。gydF4y2Ba车辆动力学原理gydF4y2Ba。Warrendale PA:汽车工程师协会,1992。gydF4y2Ba
[2]车辆动态标准委员会。gydF4y2Ba车辆动力学的术语gydF4y2Ba。SAE J670。Warrendale PA:汽车工程师协会,2008。gydF4y2Ba
[3]技术委员会。gydF4y2Ba公路车辆,车辆动力学和抓地能力,词汇gydF4y2Ba。ISO 8855:2011。瑞士日内瓦:国际标准化组织,2011年。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
介绍了R2018agydF4y2Ba另请参阅gydF4y2Ba
固体轴悬挂装置gydF4y2Ba|gydF4y2Ba实心轴悬架螺旋弹簧gydF4y2Ba|gydF4y2Ba实心轴支撑——映射gydF4y2Ba
你也可以从下面的列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba