主要内容
列车YLO v2车辆检测网络
将车辆检测的训练数据加载到工作区中。
数据=负载(“vehicleTrainingData.mat”);培训数据=数据。车辆培训数据;
指定存储训练样本的目录。将完整路径添加到培训数据中的文件名。
dataDir=fullfile(toolboxdir(“愿景”),“视觉数据”); trainingData.imageFilename=fullfile(dataDir,trainingData.imageFilename);
随机洗牌数据进行训练。
rng(0);shuffledIdx=randperm(高度(训练数据));培训数据=培训数据(shuffledIdx,:);
使用表中的文件创建imageDatastore。
imds=图像数据存储(trainingData.imageFilename);
使用表中的标签列创建boxLabelDatastore。
blds=boxLabelDatastore(培训数据(:,2:end));
合并数据存储。
ds=联合收割机(imds、blds);
加载预初始化的YOLO v2对象检测网络。
净=负荷(“yolov2VehicleDetector.mat”); lgraph=net.lgraph
LGRAPHE=LayerGraph,属性:Layers:[25×1 nnet.cnn.layer.layer]连接:[24×2表格]输入名称:{'input'}输出名称:{'YOLOV2OUTPUTTALYER'}
检查YOLO v2网络中的图层及其属性。您还可以按照中给出的步骤创建YOLO v2网络创建YOLO v2对象检测网络.
层
ans=25x1层阵列和层:1“输入”图像输入128x128x3图像2“conv_1”卷积16 3x3卷积带跨步[1]和填充[1]3“BN1”批标准化批标准化4“relu_1”relu relu 5“maxpool1”最大池2x2最大池带跨步[2]和填充[0 0 0 0]6'conv_2'卷积32 3x3带跨步[1]和填充的卷积[1 1]7'BN2'批标准化批标准化8'relu_2'relu relu 9'maxpool2'最大池2x2带跨步的最大池[2]和填充[0 0 0 0]10'conv_3'卷积64 3x3带跨步[1]和填充的卷积[1 1 1 1 1]11“BN3”批标准化批标准化12“relu_3”relu relu 13“maxpool3”最大池2x2最大池带跨步[2]和填充[0 0 0 0]14“conv_4”卷积128 3x3卷积带跨步[1]和填充[1 1 1]15“BN4”批次标准化批次标准化16“relu_4”relu relu 17“yolov2Conv1”卷积128 3x3带跨距卷积[1]和填充“相同”18“yolov2Batch1”批次标准化批次标准化19“yolov2Relu1”relu 20“yolov2Conv2”卷积128 3x3带跨距卷积[1]和填充“相同”21“yolov2Batch2”批次标准化批次标准化22“yolov2Relu2”ReLU ReLU 23“yolov2ClassConv”卷积24 1x1卷积,带跨距[1]和填充[0]24“yolov2Transform”Yolov2转换层。Yolov2转换层带有4个锚。25“yolov2OutputLayer”Yolov2输出Yolov2输出带有4个锚。
配置网络培训选项。
选项=培训选项(“sgdm”,...“初始学习率”,0.001,...“冗长”符合事实的...“MiniBatchSize”,16,...“MaxEpochs”,30,...“洗牌”,“从来没有”,...“详细频率”,30,...“检查点路径”,tempdir);
培训YOLO v2网络。
[检测器,信息]=trainYOLOv2ObjectDetector(ds,lgraph,选项);
*************************************************************************为以下对象类培训YOLO v2对象检测器:*单CPU车辆培训。|===============================================================================================================================================================================================================================================================================================================================================================================================================================================================历元|迭代|经过的时间|小批量|小批量|基础学习| | | | | |(hh:mm:ss)第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第第二方的第二方的第二方的第二方的第四方的第二方的第四方的第四方的第四方的第四方的第四方的第四方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第二方的第四方的第二方的第四方的第二方的第二方的第四方的第二方的第四方的第二方的第四方的第四方的第四方的第二方的第四方的第二方的第四方的第四方的第第四方的第四方的第二方的第四方的第四方的第四方的据据据据据据据据据据据据据据据据据据据|0.0010 | 4 | 60 | 00:00:27 | 1.13 | 1.3 | 0.0010 | 5 | 90 | 00:00:39 | 0.64 | 0.0010 | 7 | 120 | 00:00:51 | 0.65 1240.0010 | 9 |00:01:04 | 0.72 | 0.5 | 0.0010 | | 10 | 180 | 00:01:16 | 0.52 | 0.3 | 0.0010 | | 12 | 210 | 00:01:28 | 0.45 | 0.2 | 0.0010 | | 14 | 240 | 00:01:41 | 0.61 | 0.4 | 0.0010 | | 15 | 270 | 00:01:52 | 0.43 | 0.2 | 0.0010 | | 17 | 300 | 00:02:05 | 0.42 | 0.2 | 0.0010 | | 19 | 330 | 00:02:17 | 0.52 | 0.3 | 0.0010 | | 20 | 360 | 00:02:29 | 0.43 | 0.2 | 0.0010 | | 22 | 390 | 00:02:42 | 0.43 | 0.2 | 0.0010 | | 24 | 420 | 00:02:54 | 0.59 | 0.4 | 0.0010 | | 25 | 450 | 00:03:06 | 0.61 | 0.4 | 0.0010 | | 27 | 480 | 00:03:18 | 0.65 | 0.4 | 0.0010 | | 29 | 510 | 00:03:31 | 0.48 | 0.2 | 0.0010 | | 30 | 540 | 00:03:42 | 0.34 | 0.1 | 0.0010 | |==================================================================================================================================================================探测器培训完成*************************************************************************
检查检测器的性能。
探测器
检测器=Yolov2Object检测器,具有以下属性:型号名称:“车辆”网络:[1×1 DAG网络]训练图像大小:[128]固定盒:[4×2双]类名:车辆
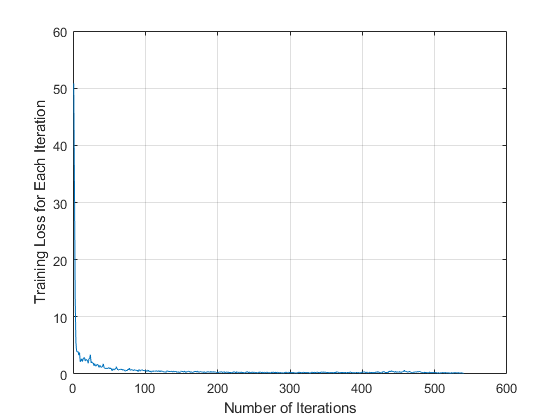
您可以通过检查每次迭代的训练损失来验证训练精度。
图:绘制(信息培训损失)网格在…上xlabel(“迭代次数”)伊拉贝尔(“每次迭代的培训损失”)
将测试映像读入工作区。
img=imread('detectcars.png');
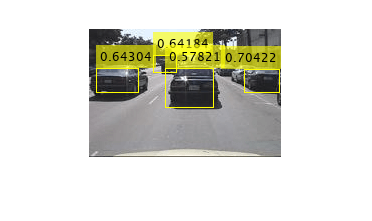
在测试图像上运行经过培训的YOLO v2目标检测器,以进行车辆检测。
[b框,分数]=检测(检测器,img);
显示检测结果。
如果(~isempty(bboxes))img=插入对象注释(img,“矩形”,b框,分数);终止图imshow(img)
您还可以从以下列表中选择网站:
