集成视觉HDL块分成的Camera Link系统
这个例子说明了如何设计一个愿景HDL工具箱算法集成到使用摄像机信号草丁协议现有的系统。
视觉HDL工具箱™模块使用自定义的流媒体视频格式。如果你整合视觉HDL工具箱算法到现有的设计,并且在不同的流媒体视频格式,操作验证码,您必须在边界上的控制信号转换。该示例使用自定义的系统对象的控制信号转换的Camera Link格式和Vision HDL工具箱之间pixelcontrol格式。模型导入系统对象的Simulink通过使用MATLAB系统框图。万博1manbetx
模型的结构
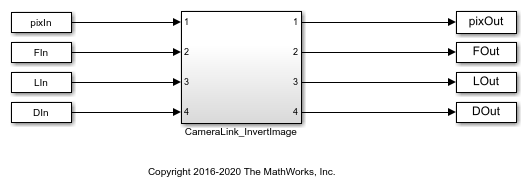
该模型进口像素数据和控制信号从MATLAB®工作空间中的摄像机链路格式。该CameraLink_InvertImage子系统是专为集成到现有的系统,其使用的Camera Link协议。该CameraLink_InvertImage子系统的控制信号转换从Camera Link的格式向pixelcontrol格式,修改使用所述查找表块,然后将像素数据转换信号回照相机链接格式的控制。该模型导出所得到的数据和控制信号的工作区的变量。
该子系统的结构
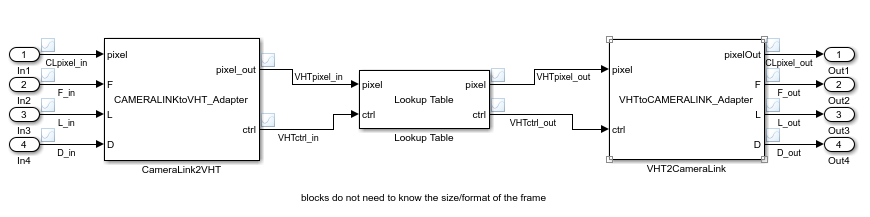
该CameraLink2VHT和VHT2CameraLink块是指向自定义的系统对象MATLAB系统块。该对象的Camera Link信号和之间进行转换pixelcontrol通过视觉HDL工具箱块和对象使用格式化。
你可以把视觉HDL工具箱模块任意组合成子系统的中间。本例使用的反转查找表。
你可以从这个子系统生成HDL。
导入数据中的Camera Link格式
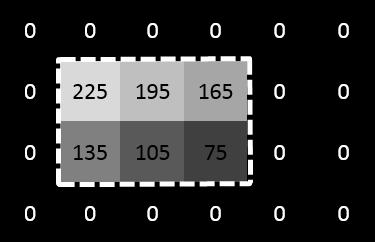
相机连接器由三个控制信号的:F表示有效帧,L表示每个有效行,d表示各有效像素。对于这个例子,输入数据和控制信号在所定义的InitFcn打回来。向量描述该2×3,8位灰度帧。在图中,活动图像区域是在虚线矩形和无效像素包围它。像素标有自己的灰度值。
![]()
FIN =逻辑([0,0,0,0,0,0,0,1,1,1,1,1,1,1,1,1,0,0,0,0,0,0,0,0]);LIN =逻辑([0,0,0,0,0,0,0,1,1,1,0,0,0,1,1,1,0,0,0,0,0,0,0,0]);DIN =逻辑([0,0,0,0,0,0,0,1,1,1,0,0,0,1,1,1,0,0,0,0,0,0,0,0]);pixIn = UINT8([0,0,0,0,0,0,0,30,60,90,0,0,0,120,150,180,0,0,0,0,0,0,0,0]);
转换的Camera Link控制信号来pixelcontrol格式
编写自定义系统对象的Camera Link信号转换为视觉HDL工具箱格式。此示例使用在设计对象转换摄像机控制信号来pixelcontrol格式例。
的对象转换的控制信号,然后创建包含新的控制信号的结构。当对象被包括在MATLAB系统块,该块将这种结构进入由视觉HDL工具箱块预期的总线格式。对于System对象的完整代码,请参见CAMERALINKtoVHT_Adapter.m。
创建MATLAB系统块,并将其指向系统对象。

设计理念HDL工具箱算法
选择视觉HDL工具箱块来处理视频流。这些模块接受并返回一个标像素值和pixelcontrol总线包含相关联的控制信号。这种标准的接口可以很容易地阻止视觉HDL工具箱库连接在一起。
此示例使用查找表块以反转所述测试图像中的每个像素。表中数据集的反UINT8灰度色彩空间。

转换pixelcontrol到相机链接
编写自定义系统要转换的对象视觉HDL工具箱信号回相机链接的格式。此示例使用在设计对象转换摄像机控制信号来pixelcontrol格式例。
对象接受控制信号的结构。当您在一个MATLAB系统块对象,该块转换输入pixelcontrol总线成这种结构。然后计算等效的Camera Link信号。对于System对象的完整代码,请参见VHTtoCAMERALINKAdapter.m。
创建第二个MATLAB系统块,并将其指向系统对象。
查看结果
运行模拟。将得到的矢量表示这个倒2×3,8位灰度帧。在图中,活动图像区域是在虚线矩形和无效像素包围它。像素标有自己的灰度值。
如果你有一个DSP系统工具箱™许可,您可以查看使用逻辑分析仪随时间变化的信号。选择在所有信号CameraLink_InvertImage子系统流,并打开逻辑分析仪。该波形示出了输入和输出摄像机链路的控制信号和在顶部的像素值,并且查找表块中的输入和输出pixelcontrol在底部进行格式化。该pixelcontrol总线被扩展到观察布尔控制信号。

有关在Simulink中观察波形的详细信息,请参阅万博1manbetx检查和测量电使用逻辑分析器(DSP系统工具箱)。
生成HDL代码的子系统
要生成HDL代码,你必须有一个HDL编码器™许可证。
要生成HDL代码,请使用以下命令。
makehdl( 'CameraLinkAdapterEx / CameraLink_InvertImage')
现在,您可以模拟和综合这些HDL文件与您现有的Camera Link系统一起。
相关话题
您还可以选择从下面的列表中的网站: