加固学习工具箱
通过强化学习设计和培训政策

强化学习工具箱™提供的功能和模块使用强化学习算法,包括DQN,A2C,和DDPG培训政策。您可以使用这些策略来实现控制器和决策算法的复杂系统,如机器人和自治系统。您可以实现使用深层神经网络,多项式,或查找表的策略。
Toolbox允许您通过启用它们与Matlab所代表的环境进行交互来培训策略®或者模万博1manbetx拟®模型。您可以评估算法,具有超参数设置和监控训练进度实验。为了提高训练性能,可以运行在云上,计算机集群,GPU的(并行计算工具箱™和MATLAB并行服务器™)并行模拟。
通过Onnx™模型格式,现有的策略可以从DENE学习框架导入Tensorflow™Keras和Pytorch(具有深度学习工具箱™)。您可以生成优化的C,C ++,和CUDA代码部署在微控制器和GPU的训练有素的政策。
该工具箱包括使用加强学习的参考示例,用于设计用于机器人和自动化驾驶应用的控制器。
开始:

强化学习算法
使用Deep Q-网络(DQN)执行代理,优势演员评论家(A2C),深确定性政策梯度(DDPG)等内置算法。使用模板来实现自定义代理的培训政策。

代理包括策略和算法。
使用深神经网络的策略和价值函数表示
使用与大型国有企业,行动空间复杂系统的深层神经网络策略。定义使用网络和架构从深度学习工具箱政策。进口ONNX模型与其他深度学习框架的互操作性。
万博1manbetx代理商Simulink模块
在Simulink中实施和培训加固学习代理。万博1manbetx

Simulink的加强学习代理块。万博1manbetx
万博1manbetxSimulink和Simscape环境
使用Si万博1manbetxmulink和Simscape™模型来表示环境。指定模型中的观察,动作和奖励信号。

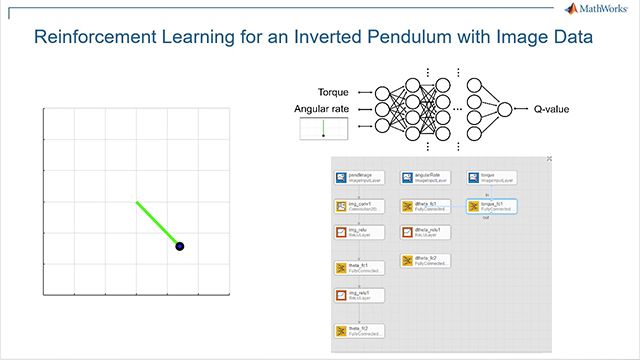
万博1manbetx倒摆的Simulink环境模型。
Matlab环境
利用Matlab函数和类来表示的环境。指定观察,行动和MATLAB文件中奖励的变量。

MATLAB用于推车系统系统。
分布式计算和多核加速
通过在多核计算机,云资源,或者计算集群采用并行计算工具箱和运行并行计算加速培训MATLAB并行服务器。

使用并行计算加速培训。
GPU加速
高性能NVIDIA加快深度神经网络培训和推论®GPU。使用matlab并行计算工具箱和大多数CUDA.®- 启用NVIDIA GPU的有计算能力3.0或更高。

加快培养使用的GPU。
代码生成
使用GPU编码器™以生成代表培训的政策MATLAB代码优化的CUDA代码。使用Matlab Coder™生成C / C ++代码以部署策略。

使用GPU编码器生成CUDA代码。
Matlab编译器支持万博1manbetx
使用Matlab Compiler™和MATLAB编译器SDK™将培训的策略部署为C / C ++共享库,Microsoft®.NET程序集,爪哇®课程和python®包裹。

包裹并将策略作为独立程序。
入门
实现基于加强学习的控制器,用于平衡倒立的摆锤,导航网格世界问题,平衡车杆系统。

解决网格世界迷宫。

培养了车道保持辅助系统。
机器人
使用加固学习的机器人设计控制器。

训练机器人行走使用强化学习。

