鲁棒控制工具箱
针对不确定对象设计鲁棒控制器
鲁棒控制工具箱™提供功能和块分析和调谐控制系统的性能和鲁棒在工厂的不确定性存在。您可以通过将名义动态与不确定元素(如不确定参数或未建模的动态)相结合来创建不确定模型。你可以分析对象模型不确定性对控制系统性能的影响,并识别不确定元素的最坏情况组合。h -∞和mu-synthesis技术可以让你设计出最大限度的鲁棒稳定性和性能的控制器。
该工具箱为Control System toolbox™的自动调优功能增加了健壮的调优功能。调谐控制器可以分散与多个可调谐块跨越多个反馈回路。在整个不确定性范围内,您可以优化标称工厂的性能,同时强制执行较低的最低性能。
开始:
结合标称动力学和不确定因素,如不确定参数或被忽略的动力学,建立详细的不确定模型。用不确定状态空间和频率响应模型表示不确定系统。
在线性化Simulink模型时,通过将某些块指定为不确定块,增加不万博1manbetx确定性。

参数不确定系统的波德图。
鲁棒稳定性和性能
计算基于磁盘的SISO和MIMO反馈环的增益和相位裕度。量化不确定性如何影响控制系统的稳定性和性能。为系统特定的不确定性计算健壮的稳定性和健壮的性能裕度。

与经典增益和相位裕度相比,磁盘裕度提供了更全面的鲁棒稳定性。

阶跃扰动的标称和最坏情况抑制。
蒙特卡罗分析
在规定的不确定范围内生成不确定系统的随机样本。可视化不确定性如何影响系统的时间和频率响应。利用不确定状态空间块在Simulink中注入不确定性,并进行蒙特卡罗仿真。万博1manbetx

采样系统的尼奎斯特图。
h∞和合成
利用h -∞和mu-synthesis等算法合成鲁棒的MIMO控制器。
优化固定控制结构的h∞性能。使用混合灵敏度或Glover-McFarlane方法自动完成环形任务。

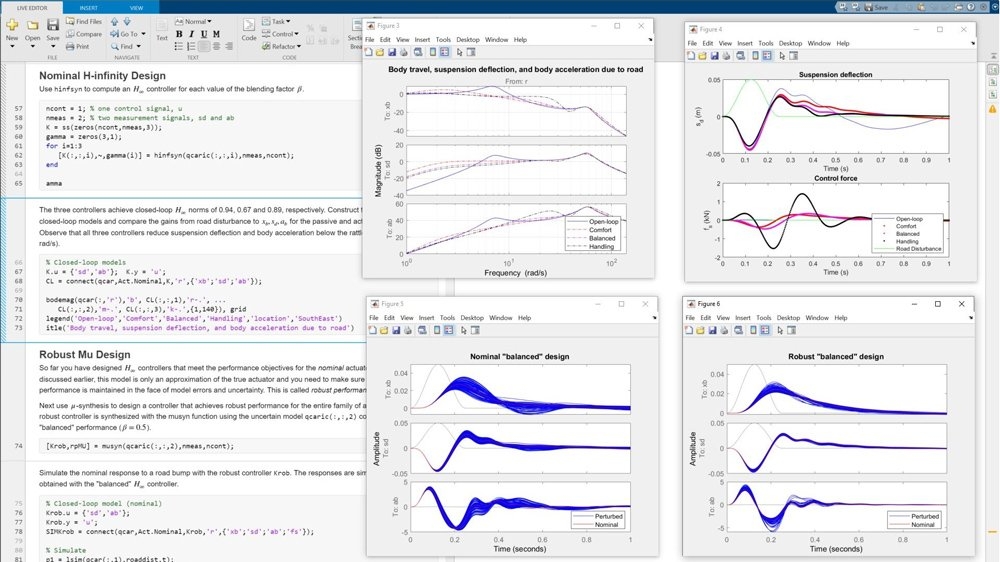
具有h -∞控制器的不确定闭环模型。
不确定控制系统的鲁棒整定
指定调谐要求,如跟踪性能,干扰抑制,噪声衰减,闭环极点阻尼和稳定裕度。同时调整多个工厂模型或控制配置。在设备参数的不确定范围内最大限度地提高性能。评估控制器在时间和频率响应图中的鲁棒性。

控制系统调谐器与多个参数变化(调谐响应)。
基于系统的Hankel奇异值,利用可加或可乘误差方法降低模型阶数。降低由h -∞和mu-synthesis算法产生的控制器的阶数,以消除多余状态,同时保持基本动力学。

博德图比较了多层建筑刚体运动动力学的原始和降阶模型的幅度和相位。