博德图设计
博德图设计是修改补偿器以实现特定开环响应(环路整形)的交互式图形化方法。交互式地形成开环响应使用控制系统设计者,使用波德编辑器.在编辑器中,您可以根据增益和相位裕度规格调整开环带宽和设计。
要调整环路形状,可以向补偿器中添加极点和零点,并直接在波德编辑器,或者您可以使用补偿器编辑器。有关更多信息,请参见编辑补偿器动态.
中提供的所有调优方法的信息控制系统设计者,请参阅控制系统设计器调优方法.
利用波德图图形调谐的直流电动机补偿器
本例展示了如何使用波德图图形调谐技术设计直流电机的补偿器。
工厂模型和要求
直流电机的传递函数,如中所述例子:直流电动机是:
对于本例,设计需求如下:
上升时间小于0.5秒
稳态误差小于5%
超调量小于10%
增益裕度大于20db
相位裕度大于40度
开放式控制系统设计者
在MATLAB中®命令行,创建工厂的传递函数模型,并打开控制系统设计者在Bode Editor配置中。
G = tf(1.5,[1 14 40.02]);controlSystemDesigner (“预示”G);
应用程序打开并导入G作为默认控制体系结构的工厂模型,配置1.
在应用程序中,打开以下响应图:
开环波德编辑器为
LoopTransfer_C响应。这个响应就是开环传递函数GC,在那里C补偿器和G是植物。阶跃响应为
IOTransfer_r2y响应。这个响应就是整个闭环系统的输入输出传递函数。
提示
打开开环波德编辑器当控制系统设计者已经开了,就上了控制系统选项卡,在调优方法下拉列表,选择波德编辑器.在“选择要编辑的响应”对话框中,选择要绘制的现有响应,或创建新型开环响应.
若要同时查看开环频率响应和闭环阶跃响应,请单击并拖动图形到所需位置。
应用程序显示波德编辑器而且阶跃响应阴谋并排。
调整带宽
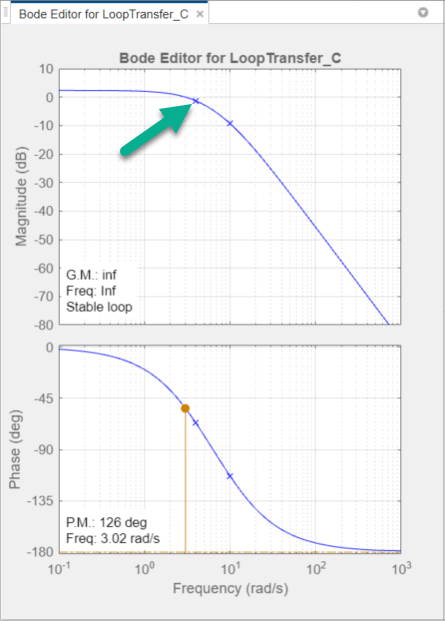
由于设计要求上升时间小于0.5秒,所以将开环直流交叉频率设置为约3 rad/s。在一阶近似下,这个交叉频率对应的时间常数为0.33秒。
为了使交叉更容易看到,打开绘图网格。右键单击波德编辑器绘制区域,并选择网格.该应用程序在波德反应图中添加了一个网格。
调整交叉频率,增加补偿器增益。在波德编辑器图,在级响应图,向上拖动响应。这样做增加了补偿器的增益。

当你拖动幅度图时,应用程序会计算补偿器增益并更新响应图。
向上拖动幅度响应,直到交叉频率约为3 rad/s。
查看阶跃响应特性
将上升时间加到阶跃响应绘图,右键单击绘图区域,然后选择特征>上升时间.
将光标移动到上升时间指示器上,即可查看上升时间。

上升时间在0.23秒左右,满足设计要求。
类似地,将峰值响应添加到阶跃响应绘图,右键单击绘图区域,然后选择特征>峰值响应.
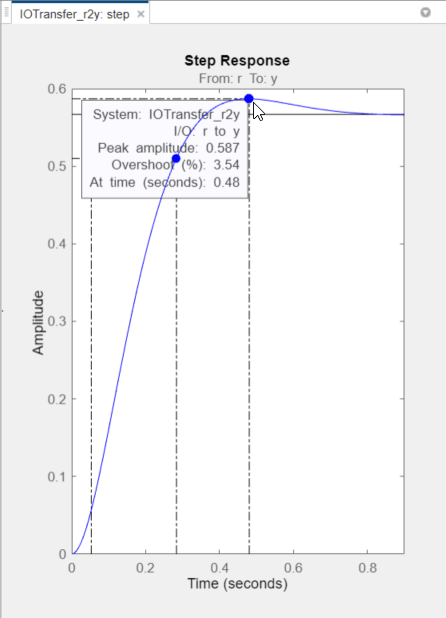
峰值超调约为3.5%。
将积分器添加到补偿器
为了满足5%的稳态误差要求,通过在补偿器中添加积分器来消除闭环阶跃响应中的稳态误差。在波德编辑器右键单击绘图区域,并选择加极或零>积分器.
加一个积分器产生零稳态误差。然而,改变补偿器动态也会改变交叉频率,增加上升时间。为了减少上升时间,将交叉频率提高到3 rad/s左右。
调整补偿器增益
为了将交叉频率恢复到3 rad/s左右,进一步增加补偿器增益。右键单击波德编辑器绘制区域,并选择编辑补偿器.
在“补偿器编辑器”对话框中补偿器节,指定增益为99,按输入.
响应图会自动更新。
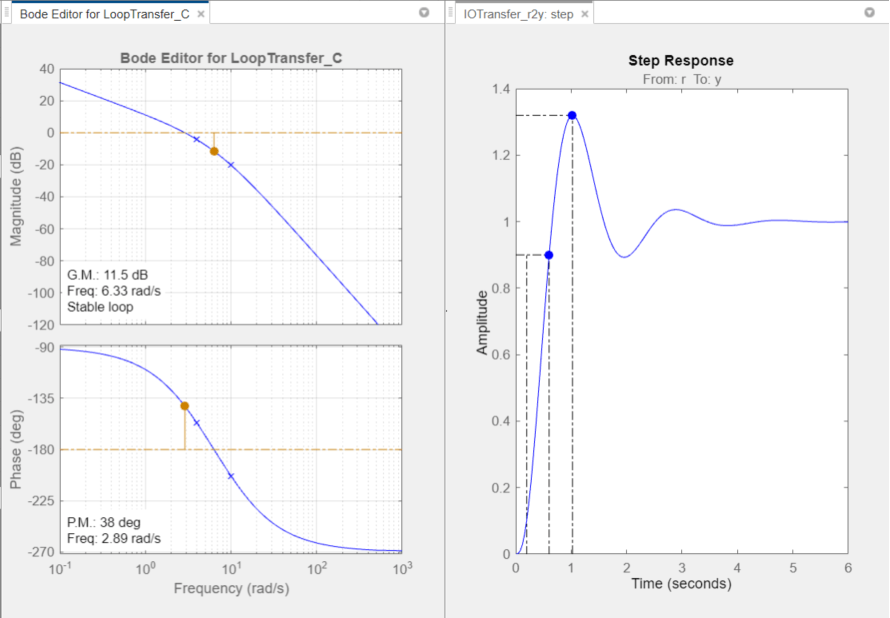
上升时间在0.4秒左右,满足设计要求。然而,峰值超调约为32%。由增益和积分器组成的补偿器不足以满足设计要求。因此,补偿器需要额外的动力学。
将引线网络添加到补偿器
在波德编辑器,回顾当前补偿器设计的增益裕量和相位裕量。设计要求增益裕度大于20 dB,相位裕度大于40度。目前的设计不能满足这些要求。

为了增加稳定裕度,在补偿器上增加导联网络。
在波德编辑器,右键选择加极或零>引领.
要指定导网极的位置,请单击震级响应。应用程序添加了一个真正的杆子(红色)X)和实零(红色)O)到补偿器和到波德编辑器情节。
在波德编辑器,拖动极点和零点即可改变它们的位置。当你拖动它们时,应用程序会更新极点/零点值并更新响应图。
要减小极点或零点的大小,请向左拖动它。由于极点和零点在负实轴上,向左拖动它们会使它们更接近复平面的原点。
提示
当你拖动一个极点或零点时,应用程序会在右侧的状态栏中显示新的值。
作为初始估计,将0拖到周围的某个位置7并把杆子绕到一个位置-11年.
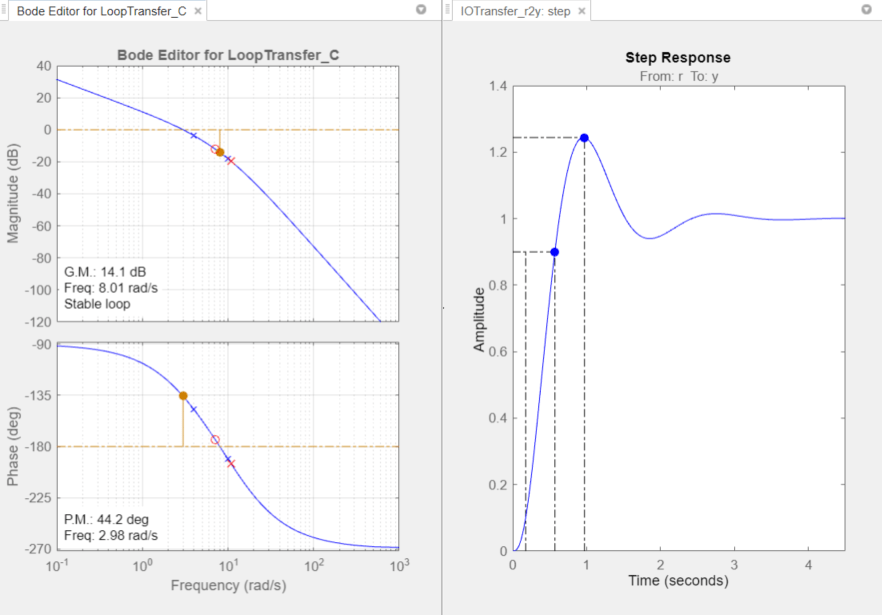
相裕度满足设计要求;然而,收益边际仍然太低。
编辑导线网络极点和零点
为了提高控制器性能,可以调优引线网络参数。
在“补偿器编辑器”对话框中动力学部分,单击引领行。
在编辑所选动态部分,在真正的零文本框,指定的位置-4.3,按输入.这个值接近最慢(最左)的直流电机工厂极。
在真正的极文本框中,指定值-28年,按输入.

当修改先导网络参数时,需要修改先导网络参数补偿器响应图会自动更新。
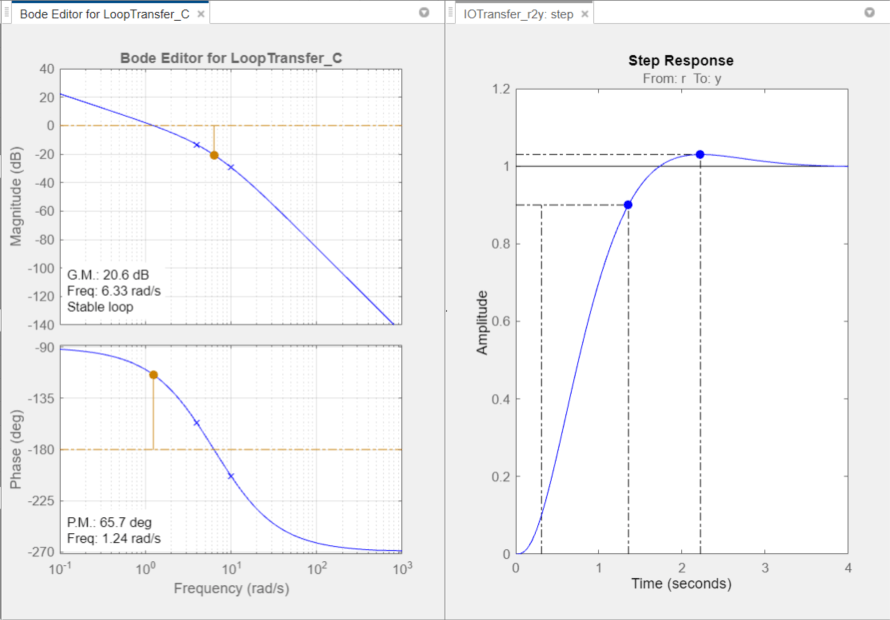
在应用中,在波德编辑器的增益边际20.5刚好符合设计要求。
若要增加系统的鲁棒性,请在“补偿器编辑器”对话框中,将补偿器增益减小到84.5,按输入.增益边际增加到21.8,响应图更新。
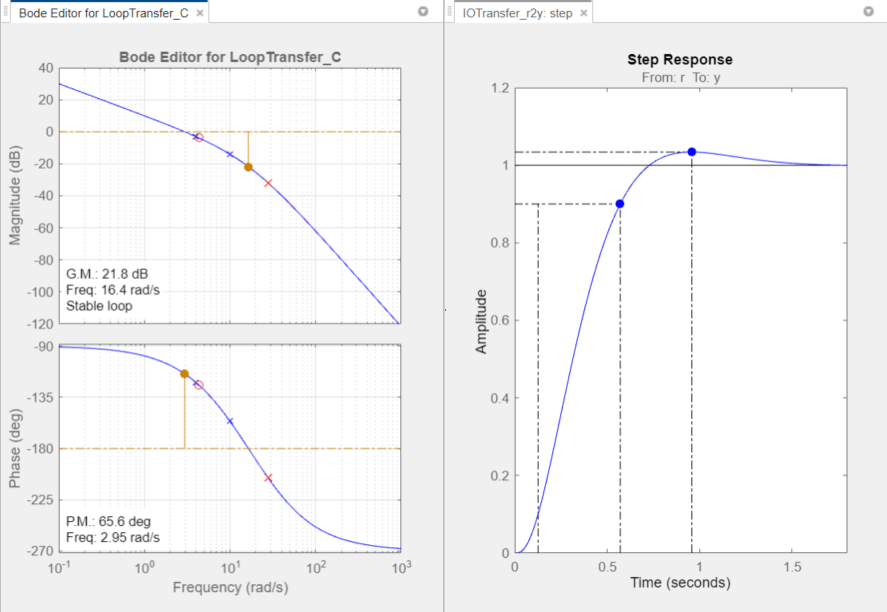
在控制系统设计者,在响应图中,将系统性能与设计要求进行比较。系统性能特点如下:
上升时间0.445秒。
稳态误差为零。
超调3.39%。
增益裕度为21.8 dB。
相位裕度为65.6度。
系统响应满足所有设计要求。
另请参阅
相关的话题
您也可以从以下列表中选择一个网站: