离散化一个补偿器
这个例子展示了如何将一个补偿器从连续使用几个离散时间离散化方法,识别方法,收益率在频域良好的匹配。
你会设计一个补偿器在连续时间,然后需要把它转换成离散时间数字实现。当你这样做时,你想要保护频域离散化特征,对于您的性能和稳定性需求至关重要。
在接下来的控制系统,G用一把锋利的共振是一种连续二阶系统大约rad / s。
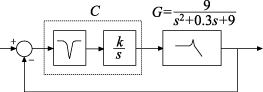
一个有效的控制器,该系统包括一个陷波滤波器串联积分器。创建一个模型的控制器。
切口=特遣部队([1,0.5,9],[1、5、9]);integ = pid (0, 0.34);C = integ *切口;bodeplot (C)
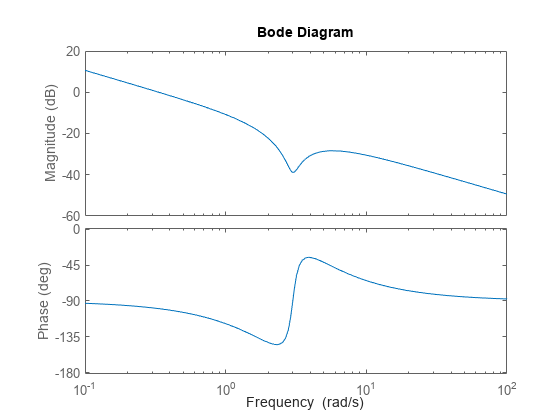
陷波滤波器集中在3 rad / s抵消共振的影响G。这种配置允许更高的环路增益更快的总体响应。
离散化补偿器。
Cdz = c2d (0.5 C);
的汇集命令支持多种不同万博1manbetx的离散化方法。因为这个命令不指定一个方法,汇集使用默认方法,零级(ZOH)。ZOH方法,离散时域响应的补偿器与连续时间在每个时间步反应。
离散控制器Cdz有一个示例0.5秒的时间。在实践中,您选择的样本时间可能受到的系统实现控制器,或控制系统的带宽。
的频域响应进行比较C和Cdz。
bodeplot (C, Cdz)传说(“C”,“Cdz”);
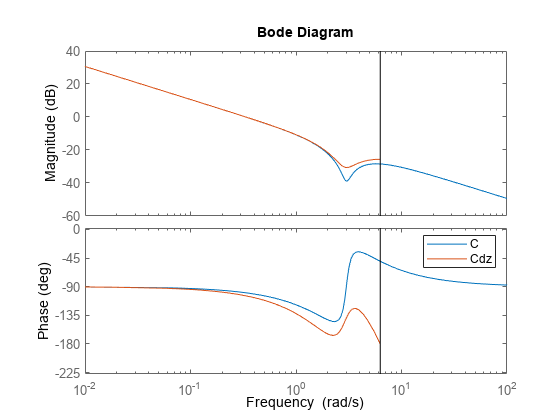
垂直的线标志着奈奎斯特频率, ,在那里 样品时间。奈奎斯特频率附近的响应离散补偿器是连续时间扭曲的相对响应。因此,离散的过滤器可能不妥善应对植物共振。
为了解决这个问题,试着离散化补偿器使用Tustin方法并比较ZOH结果。Tustin离散化方法得到的匹配更好比ZOH在频域方法。
Cdt =汇集(C, 0.5,“tustin”);plotopts = bodeoptions;plotopts。Ylim = {(-60, 40) (-225,0)};bodeplot (C Cdz Cdt plotopts)传说(“C”,“Cdz”,Cdt的)
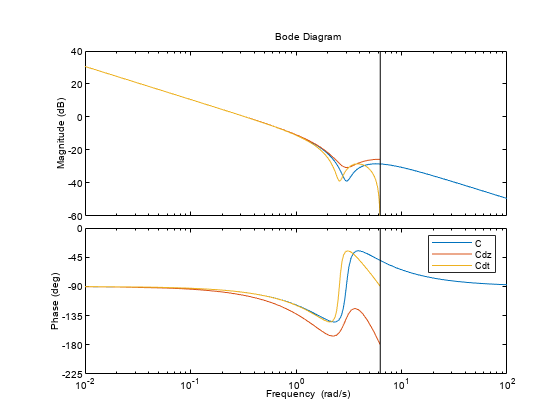
Tustin方法保留了切口的深度。然而,该方法引入了频移,对于许多应用程序来说是不能接受的。可以弥补频移通过指定等级的频率作为Tustin prewarping频率变换。
离散化补偿器使用Tustin prewarping方法和频率,并比较结果。
discopts = c2dOptions (“方法”,“tustin”,“PrewarpFrequency”,3.0);Cdtp =汇集(0.5 C, discopts);bodeplot (C, Cdt, Cdtp plotopts)传说(“C”,Cdt的,“Cdtp”)
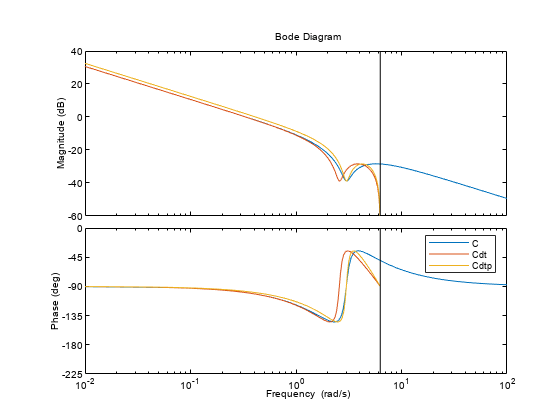
指定额外的离散化选项以外的离散化方法,使用c2dOptions。在这里,离散化选项集discopts指定了prewarp Tustin方法和频率。prewarp频率是3.0 rad / s,切口的补偿器的频率响应。
使用Tustin方法与频率prewarping收益率比Tustin没有prewarping更加匹配频率响应。