六步变换
库:
电机控制Blockset /控制/控制参考
描述
的六步变换块使用120度传导模式来生成一个切换序列来实现六整流(或梯形变换)三相无刷直流电机。您可以使用信号切换到操作开关和控制定子电流,因此,控制电动机转速和旋转方向。
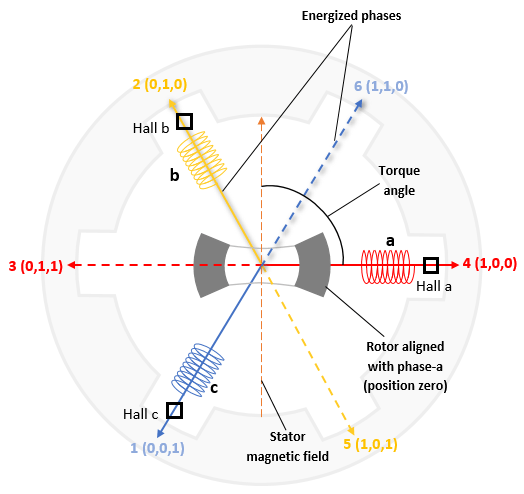
块接受大厅序列号或转子位置从一个位置传感器(如大厅或正交编码器传感器)和转矩的方向作为输入。它使用大厅或位置输入序列来确定转子的部门。块计算转换序列,使其激发相应的阶段保持转矩角(d-axis转子和定子磁场的夹角)90度(30度的偏差)。例如,如以下图所示,大厅状态5阶段B和C阶段触发旋转马达。
这个图是一个例子显示了定子磁场相量连同他们的默认大厅序列。建议您使用无刷直流电机霍尔传感器校准序列获得大厅序列和使用这个大厅序列块实现整流的六个步骤。
块使用基于大厅的换向逻辑序列生成转换序列。
| 大厅状态(b大厅,大厅,大厅c) | 切换序列(AA“BB”CC”) | ||
|---|---|---|---|
| AA’ | BB” | CC ' | |
| 4 (100) | 00 | 10 | 01 |
| 6 (110) | 01 | 10 | 00 |
| 2 (010) | 01 | 00 | 10 |
| 3 (011) | 00 | 01 | 10 |
| 1 (001) | 10 | 01 | 00 |
| 5 (101) | 10 | 00 | 01 |
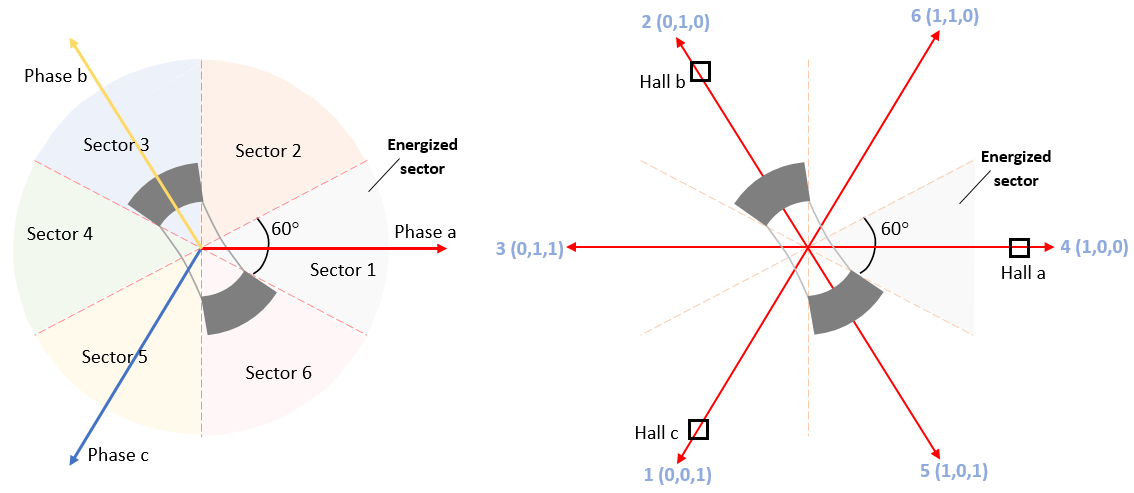
这图显示了定子磁场相量与可能的领域(从输入转子位置确定)。

块使用换向逻辑基于位置传感器信号来生成转换序列。
| 位置(θ) | 部门 | 切换序列(AA“BB”CC”) | ||
|---|---|---|---|---|
| AA’ | BB” | CC ' | ||
| (-30°30°) | 1 | 00 | 10 | 01 |
| (30°、90°) | 2 | 01 | 10 | 00 |
| (90°、150°] | 3 | 01 | 00 | 10 |
| (150°、210°] | 4 | 00 | 01 | 10 |
| (210°、270°] | 5 | 10 | 01 | 00 |
| (270°、330°] | 6 | 10 | 00 | 01 |

港口
输入
输出
参数
扩展功能
版本历史
介绍了R2020b