自适应巡航控制系统使用模型预测控制
这个例子展示了如何使用自适应巡航控制系统在仿真软件®和演示万博1manbetx了这个块的控制目标和约束。
自适应巡航控制系统
车辆(自我车)配备自适应巡航控制系统(ACC)有一个传感器,如雷达、测量距离前面的车辆在同一车道(领导的车), 。传感器也措施的相对速度过车,
。传感器也措施的相对速度过车, 。ACC系统操作在以下两种模式:
。ACC系统操作在以下两种模式:
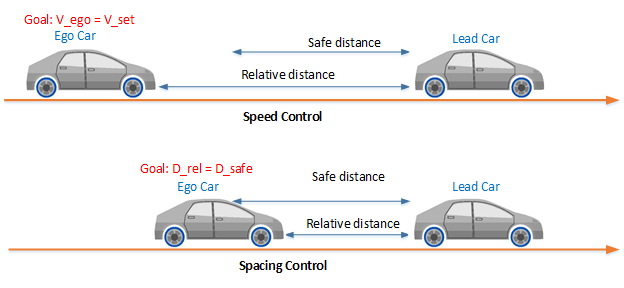
速度控制:自我汽车司机让速度传播。
间距控制:自我领导的车车保持安全距离。
ACC系统决定使用哪个模式基于实时雷达测量。例如,如果领导的车太近,ACC系统从速度控制间距控制开关。同样,如果领导的车是远,ACC系统从间距控制速度控制开关。换句话说,ACC系统使自我在司机让汽车旅行速度,只要保持一个安全的距离。
下面的规则用于确定ACC系统操作模式:
如果
 ,然后速度控制模式是活跃。控制目标是跟踪司机让速度,
,然后速度控制模式是活跃。控制目标是跟踪司机让速度, 。
。


如果
 ,然后间距控制模式是活跃的。控制的目标是保持安全的距离,
,然后间距控制模式是活跃的。控制的目标是保持安全的距离, 。
。


万博1manbetx导致汽车仿真软件模型,自我的车
铅汽车和自我汽车的动力学建模仿真软件。万博1manbetx打开仿真软件模型。万博1manbetx
mdl =“mpcACCsystem”;open_system (mdl)

近似真实的驾驶环境,导致汽车的加速度变化显示在模拟正弦波。自适应巡航控制系统块输出的加速度控制信号自我的车。
定义样本的时间,Ts仿真时间,T,在几秒钟内。
t = 0.1;T = 80;
自我的车辆和车辆,加速度和速度之间的动力学建模:
近似于节流机构的动力学和车辆惯性。
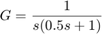
指定自我的线性模型车。
G_ego =特遣部队(1,[0.5,1,0]);
指定的初始位置和速度两辆车。
x0_lead = 50;%初始位置领先汽车(m)v0_lead = 25;%初始速度领先汽车(米/秒)x0_ego = 10;%初始位置为自我汽车(m)v0_ego = 20;%自我汽车初始速度(米/秒)
自适应巡航控制系统的配置块
ACC系统建模仿真软件使用自适应巡航控制系统块。万博1manbetxACC系统的输入块:
司机让速度
时间差距

汽车的速度自我

相对距离领先的汽车
 (雷达)
(雷达)相对速度领先的汽车
 (雷达)
(雷达)
ACC系统的输出是自我的加速度的车。
导致汽车和自我之间的安全距离汽车是自我汽车速度的函数, :
:

在哪里 停滞默认间距和吗
停滞默认间距和吗 车辆之间的时间间隔。指定的值米,,在几秒钟内。
车辆之间的时间间隔。指定的值米,,在几秒钟内。
t_gap = 1.4;D_default = 10;
指定司机让m / s的速度。
v_set = 30;
考虑到车辆动力学的物理限制,加速度约束的范围(3 2)(米/秒^ 2)。
amin_ego = 3;amax_ego = 2;
对于这个示例,默认参数自适应巡航控制系统的块匹配仿真参数。如果你的仿真参数不同于默认值,然后更新块相应的参数。
仿真分析
运行仿真。
sim (mdl)
- - >将模型转换为离散时间。- - >输出假设扰动添加到# 2集成白噪声测量输出。假设没有干扰# 1添加到测量输出。- - >”模型。噪音”是空的。假设白噪声在每个测量输出。
仿真结果。
mpcACCplot (logsout D_default、t_gap v_set)
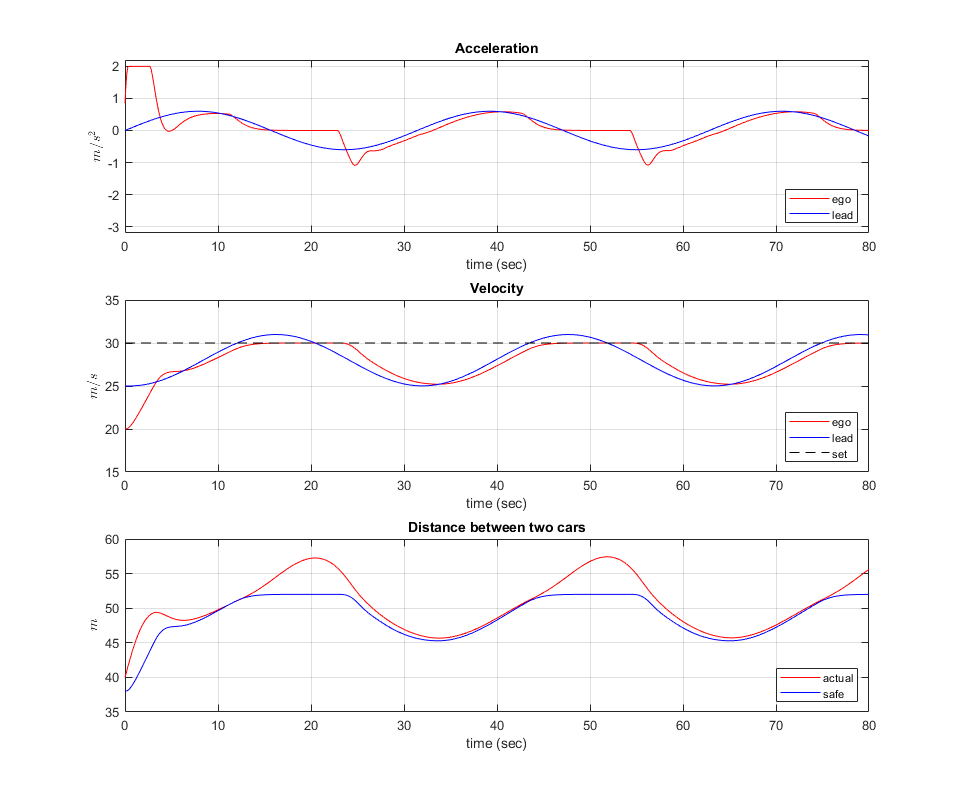
在第一个3秒,司机让速度,自我汽车加速全速。
从3到13秒,领先汽车慢慢加速。因此,导致汽车保持一个安全的距离,自我汽车加速较慢的速度。
从13岁到25秒,自我汽车维护司机让速度,如图所示速度情节。然而,随着铅汽车降低速度,20秒后间距误差开始接近0。
从25到45秒,领先汽车慢下来然后再加速。自我车保持安全距离领先汽车通过调整其速度,如图所示距离情节。
从45 - 56秒,上面的间距误差0。因此,自我的车又达到了司机让速度。
从56到76秒,减速/加速度从25到45秒间隔序列重复。
在整个模拟控制器确保实际的两辆车之间的距离大于安全距离。当实际距离足够大,那么控制器确保自我车辆之前,司机让速度。