波形设计改善现有系统的性能范围
这个例子展示了波形类型如何影响雷达系统的检测性能。认为这种情况的例子一套新的绩效目标是为现有的雷达系统设计。自从老设计再也不能达到预期的性能,采用一种新的波形。示例还显示了如何Swerling目标模型,模拟返回,然后检测目标范围。
设计规格变化
一个单稳态脉冲雷达设计的例子模拟测试信号对雷达接收机达到以下目标:
最低目标雷达截面(RCS): 1 nonfluctuating;
最大的明确范围:5公里;
检测概率:0.9;
假警报的可能性:1 e-6。
负载BasicMonostaticRadarExampleData;
新的性能要求
系统部署后,两个出现新需求:
最明确的范围需要扩大到8公里。
该系统还必须能够检测Swerling案例2的目标。
现有的设计可以实现新的性能目标进行修改?要回答这个问题,我们需要重新计算参数受这些新的需求。
第一个参数是影响脉冲重复频率(脉冲)。它需要重新计算基于新的最大明确的范围。
prop_speed = radiator.PropagationSpeed;max_range = 8000;脉冲重复频率= prop_speed / (2 * max_range);
相比30千赫现有设计的脉冲,脉冲重复频率,18.737 kHz,更小。因此,脉冲间隔较长。注意,这是一个微不足道的改变雷达软件和硬件成本相当便宜。
波形。脉冲重复频率=脉冲重复频率;
接下来,因为目标使用Swerling例2模型描述,我们需要使用Shnidman的方程,而不是Albersheim的方程,计算所需的信噪比达到指定的Pd和Pfa。Shnidman方程假设不相干的集成和平方律检测器。脉冲的数量将是10。
num_pulse_int = 10;pfa = 1 e-6;snr_min = shnidman (0.9、pfa num_pulse_int, 2)
snr_min = 6.1583
波形选择
如果我们使用相同的矩形波形在现有的设计中,脉冲宽度将保持不变,因为它是由距离分辨率决定的。然而,由于我们的最大射程从5公里增加到8公里和目标模型从nonfluctuating转向Swerling例2中,我们需要重新计算所需的峰值传输能量。
fc = radiator.OperatingFrequency;λ= prop_speed / fc;peak_power =((4 *π)^ 3 * noisepow (1 / waveform.PulseWidth) * max_range ^ 4 *…db2pow (snr_min)) / (db2pow (2 * transmitter.Gain) * 1 *λ^ 2)
peak_power = 4.4821 e + 04
峰值功率大约是八倍之前的要求。这不再是一个简单的修改,因为(1)现有的雷达硬件旨在产生一个脉冲峰值功率约为5200 w。虽然大多数设计会让一些利润高于所需的权力,不太可能一个现有的系统可以容纳8倍;(2)是非常昂贵的更换硬件输出高功率。因此,当前的设计需要修改,以适应新的目标通过使用更复杂的信号处理技术。
线性调频波形
减少电力需求的一个方法是使用非矩形波形的波形。例如,一个线性调频波形可以使用更长时间比一个矩形脉冲波形。因此,所需的传输能量峰值下降。
让我们检查线性调频波形的配置的细节。
所需的距离分辨率决定了波形带宽。对于一个线性调频波形,带宽等于它的带宽。然而,脉冲宽度是不再局限于脉冲带宽的倒数,所以可以使用更长的脉冲宽度。我们用一个脉冲宽度是20倍的时间和设置采样率脉冲带宽的两倍。
range_res = 50;pulse_bw = prop_speed / (2 * range_res);pulse_width = 20 / pulse_bw;fs = 2 * pulse_bw;波形= phased.LinearFMWaveform (…“SweepBandwidth”pulse_bw,…“脉冲宽度”pulse_width,…脉冲重复频率的脉冲重复频率,…“SampleRate”fs);
我们现在确定所需新传输能力达到设计要求。
peak_power =((4 *π)^ 3 * noisepow (1 / waveform.PulseWidth) * max_range ^ 4 *…db2pow (snr_min)) / (db2pow (2 * transmitter.Gain) * 1 *λ^ 2)
peak_power = 2.2411 e + 03
这个传输能量在我们现有的雷达系统的能力。我们达到了一个峰值传输能量,能满足新的需求,无需修改现有的硬件。
发射机。PeakPower = peak_power;
系统仿真
现在,我们已经定义了雷达,以满足设计规范,我们设置目标和环境来模拟整个系统。
目标
在上述例子中,我们假设有三个目标在一个自由的空间环境。然而,现在目标模型是Swerling例2,目标位置和雷达横截面是指定如下:
tgtpos = [[2024.66;0;0],[6518.63;0;0],[6845.04;0;0]];tgtvel = [(0, 0, 0), (0, 0, 0), [0, 0, 0]];tgtmotion = phased.Platform (“InitialPosition”tgtpos,“速度”,tgtvel);tgtrcs = (2.2 1.1 1.05);fc = radiator.OperatingFrequency;目标= phased.RadarTarget (…“模型”,“Swerling2”,…“MeanRCS”tgtrcs,…“OperatingFrequency”、fc);
我们设置了种子生成目标的rcs,这样我们可以复制相同的结果。
目标。SeedSource =“属性”;目标。种子= 2007;
传播环境
我们还建立了雷达和每个目标之间的传播渠道。
频道= phased.FreeSpace (…“SampleRate”waveform.SampleRate,…“TwoWayPropagation”,真的,…“OperatingFrequency”、fc);
信号合成
我们的种子接收机中的噪音的产生,这样我们才能重现相同的结果。
接收器。SeedSource =“属性”;接收器。种子= 2007;fast_time_grid = unigrid (0,1 / fs, 1 /脉冲重复频率,“()”);slow_time_grid = (0: num_pulse_int-1) /脉冲重复频率;rxpulses = 0(元素个数(fast_time_grid) num_pulse_int);%预先分配为m = 1: num_pulse_int%更新传感器和目标位置[sensorpos, sensorvel] = sensormotion(1 /脉冲重复频率);[tgtpos, tgtvel] = tgtmotion(1 /脉冲重复频率);%计算目标角度所看到的传感器[tgtrng, tgtang] = rangeangle (tgtpos sensorpos);%模拟脉冲的传播方向目标脉冲=波形();[txsig, txstatus] =发射机(脉冲);txsig =散热器(txsig tgtang);txsig =通道(txsig sensorpos、tgtpos sensorvel, tgtvel);%反射脉冲的目标tgtsig =目标(txsig,真实);%接收目标返回传感器rxsig =收集器(tgtsig tgtang);rxpulses (:, m) =接收机(rxsig ~ (txstatus > 0));结束
检测范围
检测阈值
检测阈值计算利用噪声信息,考虑脉冲集成。注意,在加载系统,概述了在上述例子中,噪声带宽是采样率的一半。我们一起阴谋阈值与前两个脉冲。
noise_bw = receiver.SampleRate / 2;npower = noisepow (noise_bw…receiver.NoiseFigure receiver.ReferenceTemperature);阈值= - * db2pow (npwgnthresh (pfa、num_pulse_int“非相干”));pulseplotnum = 2;helperRadarPulsePlot (rxpulses阈值,…fast_time_grid、slow_time_grid pulseplotnum);
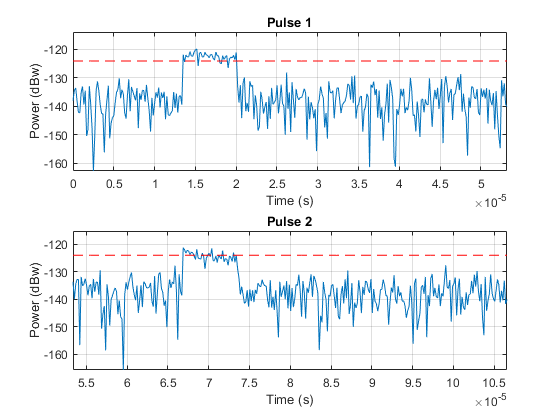
图显示的宽脉冲很可能导致可怜的距离分辨率。此外,第二个和第三个目标噪音被完全掩盖了。
匹配滤波器
在矩形波形的情况下,接收到的脉冲首先通过一个匹配滤波器改善信噪比。匹配滤波器提供了处理增益,进一步提高了检测阈值。此外,好处一个线性调频匹配滤波器的波形是压缩波形在时域脉冲过滤变得小得多,这意味着更好的距离分辨率。
matchingcoeff = getMatchedFilter(波形);matchedfilter = phased.MatchedFilter (…“CoefficientsSource”,“属性”,…“系数”matchingcoeff,…“GainOutputPort”,真正的);[rxpulses, mfgain] = matchedfilter (rxpulses);阈值=阈值* db2pow (mfgain);
补偿匹配滤波器的延迟。
matchingdelay =大小(matchingcoeff, 1) 1;rxpulses =缓冲区(rxpulses (matchingdelay + 1:结束),大小(rxpulses, 1));
然后应用于信号时变增益可以使用这样一个常数阈值在整个检测范围。
range_gates = prop_speed * fast_time_grid / 2;λ= prop_speed / fc;tvg = phased.TimeVaryingGain (…“RangeLoss”2 * fspl (range_gatesλ),…“ReferenceLoss”2 * fspl (max_rangeλ));rxpulses = tvg (rxpulses);
非相干积分
我们现在把非相干接收脉冲进一步提高信噪比。此操作也称为视频集成。
rxpulses = pulsint (rxpulses,“非相干”);helperRadarPulsePlot (rxpulses阈值,fast_time_grid slow_time_grid, 1);
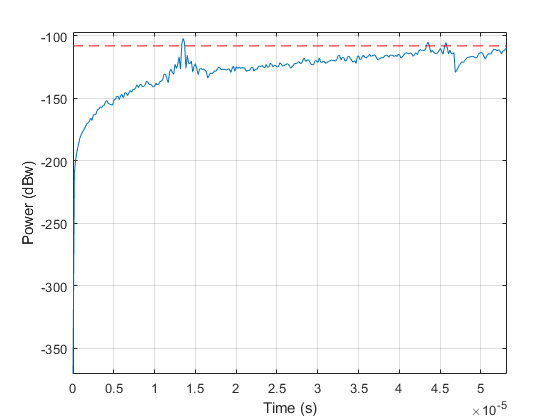
视频集成后,数据准备最后检测阶段。从上面的图中,我们可以看到,没有假警报。
检测范围
最后,进行阈值检测集成脉冲。检测方案确定了山峰的范围,然后将他们的位置转换为目标。
[~,range_detect] = findpeaks (rxpulses,“MinPeakHeight”返回值(阈值));
真正的范围和估计范围
true_range =圆(tgtrng)
true_range =1×32025 6519 6845
range_estimates =圆(range_gates (range_detect))
range_estimates =1×32025 6525 6850
注意,这些范围估计只有准确的距离分辨率,可以通过雷达系统,在本例中是50米。
总结
在这个例子中,我们使用了线性调频波形的检测范围。通过使用线性调频波形,我们可以减少所需的峰值传输能量,从而实现更大的可检测的8公里范围Swerling案例2的目标。