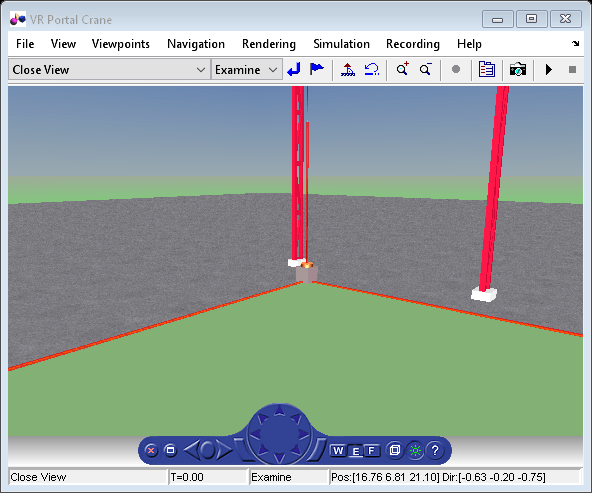
门式起重机与预定义的轨迹
vrcrane_traj的例子是基于vrcrane_joystick的例子,而不是互动运营商控制它有一个预定义的负载轨迹。
除了vrcrane_joystick示例中,这个模型展示了一种技术来创建视觉印象VRML的加入/分割运动对象世界。起重磁铁高度负载箱,移动到另一个位置然后释放框并返回到初始位置。这种效果是通过使用一个额外的,几何相同的阴影对象将作为一个独立的对象以外的起重机对象层次结构。在任何时候,只有一个加载/阴影对象的显示,使用两个VRML开关节点路由连接的语句。起重机移动后加载到一个新的位置,负载释放的时候,VRMLScript分配新的阴影对象位置根据当前加载位置。阴影对象变得可见,因为它是独立于其他起重机移动部件层次结构,它呆在起重机移动地位。
有关起重机模型层次结构和脚本逻辑是如何实现,请查看相关评论portal_crane VRML文件。x3d在文本编辑器中。
这个例子支持的声音。万博1manbetx可以听到发动机的声音时,起重机正在运行。
确认:
门式起重机VRML模型是基于所做的功马丁Foltin先生和塞缪尔·Bartos部门的自动控制系统,斯洛伐克技术大学,布拉迪斯拉发,斯洛伐克共和国。