dbscan
基于密度的带噪声应用空间聚类(DBSCAN)
句法
描述
例子
在输入数据上执行DBSCAN
群集使用DBSCAN的2-D循环数据设置默认欧几里德距离度量。此外,比较使用DBSCAN群集数据集的结果K.- 与平方欧几里德距离度量集聚。
生成包含两个嘈杂圈子的合成数据。
rng (“默认”的)再现性的百分比%数据生成参数n = 300;%每个集群的大小R1 = 0.5;第一圆的%半径R2 = 5;二圆的%半径θ= linspace(0,2 * pi,n)';x1 = r1 * [cos(θ),sin(θ)] + rand(n,1);x2 = r2 * [cos(θ),sin(theta)] + rand(n,1);x = [x1; x2];%噪声2-D循环数据集
可视化数据集。
散射(x(:,1),x(:,2))
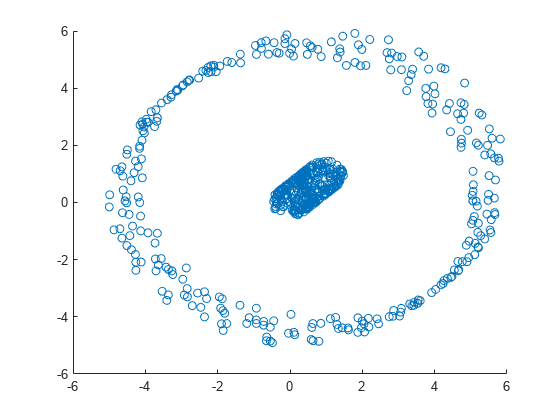
该曲线表明数据集包含两个不同的群集。
对数据进行DBSCAN集群。指定一个埃斯利昂1和a的值别人价值5。
idx = dbscan(x,1,5);%距离度量是欧几里德距离
集群可视化。
g箭偶(x(:,1),x(:,2),Idx);标题('DBSCAN使用欧几里德距离度量'的)
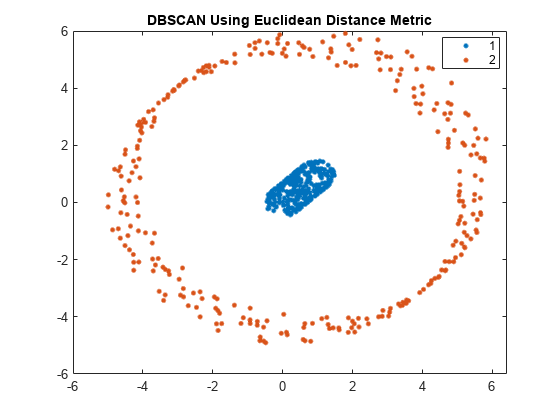
使用欧几里德距离度量标准,DBSCAN正确地标识了数据集中的两个群集。
使用平方欧几里德距离度量执行DBSCAN集群。指定一个埃斯利昂1和a的值别人价值5。
idx2 = dbscan(x,1,5,'距离'那'squareduclidean');
集群可视化。
gscatter (X (: 1) X (:, 2), idx2);标题('DBSCAN使用Squared欧几里德距离度量'的)
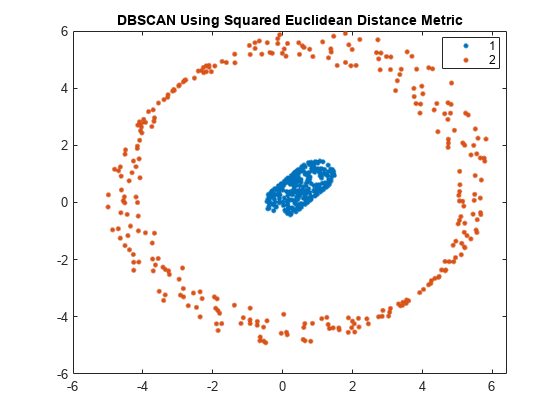
使用平方欧几里德距离度量标准,DBSCan正确地标识了数据集中的两个群集。
执行K.- 使用平方欧几里德距离度量来聚类。指定K.= 2集群。
Kidx = kmeans(x,2);%默认距离度量是平方欧几里德距离
集群可视化。
G箭壳(x(:,1),x(:,2),Kidx);标题(“使用平方欧几里得距离度量的k -均值”的)
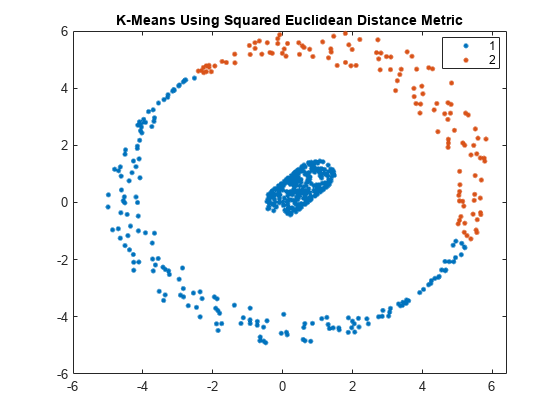
使用平方欧几里得距离度量,K.- emeans群集无法正确识别数据集中的两个群集。
对成对距离执行DBSCAN
使用观测值之间的成对距离矩阵作为输入,执行DBSCAN聚类dbscan函数,并找到异常值和核心点的数量。该数据集是激光雷达扫描,存储为一个三维点集合,其中包含车辆周围物体的坐标。
加载x,y,z物体的坐标。
加载(“lidar_subset.mat”)LOC = LIDAR_SUBSET;
为了突出车辆周围的环境,将感兴趣的区域设定在车辆的左右行20米处,在车辆前后20米,以及道路表面上方的区域。
xbound = 20;%在米ybound = 20;%在米zlowerbound = 0;%在米
裁剪数据仅包含指定区域内的点。
indics = loc(:,1)<= xbound&loc(:,1)> = -xbound......&loc(:,2)<= ybound&loc(:,2)> = - ybound......&loc(:,3)> zlowerbound;loc = loc(索引,:);
将数据可视化为二维散点图。注释情节以突出显示车辆。
散射(LOC(:,1),LOC(:,2),'。');注释('椭圆',[0.48 0.48 .1],'颜色'那'红色的'的)
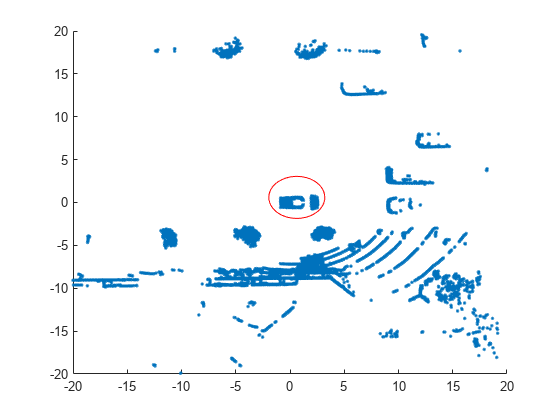
该组点(以红色盘旋)的中心包含车辆的屋顶和罩。所有其他观点都是障碍。
预编译成对距离的矩阵D.通过使用PDIST2.功能。
D = pdist2 (loc, loc);
使用使用群集数据dbscan用成对距离。指定一个埃斯利昂2和a的值别人价值50。
[IDX,Corepts] = DBSCAN(D,2,50,'距离'那'预计');
可视化结果并对图进行注释,以突出显示特定的集群。
gscatter (loc (: 1), loc (:, 2), idx);注释('椭圆',[0.54 0.41 .07 .07],'颜色'那'红色的') 网格
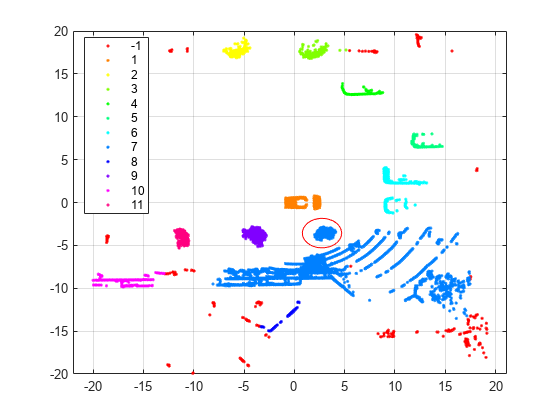
如散点图所示,dbscan识别11个集群并将车辆放在单独的群集中。
dbscan指定一组用红色圈起来的点(并以(3,-4))与地块东南象限的一组点(第7组)相同。预期这些组应该在单独的集群中。您可以尝试使用较小的值埃斯利昂分裂大群并进一步分区点。
该函数还标识了一些异常值(一个idx.的价值-1)在数据中。找到点数dbscan识别为异常值。
总和(IDX == -1)
ans = 412.
dbscan在19,070个观察中识别412个异常值。
找到点数dbscan标识为核心点。一个纪录的价值1表示核心点。
总和(corepts = = 1)
ans = 18446
dbscan确定18,446个观测值为核心点。
看确定DBSCAN参数的值下面是一个更广泛的例子。
输入参数
输出参数
更多关于
提示
在迭代许多值迭代时提高的速度
埃斯利昂,考虑通过D.作为输入dbscan.这种方法可防止该功能必须在迭代的每个点计算距离。如果你使用
PDIST2.预先执行D.,请勿指定“最小”或者“最大”名称 - 值对参数PDIST2.选择或排序列D..选择少于N.距离导致错误,因为dbscan预计D.是一个方阵。排序每一列的距离D.导致对解释的损失D.在使用时可以给出毫无意义的结果dbscan功能。为了有效的内存使用,考虑通过
D.作为逻辑矩阵而不是数字矩阵dbscan什么时候D.很大。默认情况下,Matlab®将每个值存储在一个8字节(64位)的数字矩阵中,将每个值存储在一个逻辑矩阵中,使用1字节(8位)。选择一个值
别人,考虑一个大于或等于输入数据的尺寸的值加上[1]。例如,对于一个N.-经过-P.矩阵X, 放'矿物'等于P.+1或更大。选择值的一种可能的策略
埃斯利昂是生成一个K.- 设计图形X.对于每一点X,找到到的距离K.最接近的点,并对这个距离分类点。通常,图表包含膝盖。对应于膝盖的距离通常是一个不错的选择埃斯利昂,因为它是点开始拖延到异常值(噪声)地区[1]的区域。
算法
DBSCAN是一种基于密度的聚类算法,旨在发现数据中的群集和噪声。该算法识别三种点数:核心点,边界点和噪声点[1]。对于指定的值
埃斯利昂和别人, 这dbscan函数实现算法如下:从输入数据集
X,选择第一个未标记的观察X1作为当前点,并初始化第一群集标签C到1。找到邻域内的点集
埃斯利昂目前的点。这些点是邻居。如果邻居数量小于
别人,然后将当前点标记为噪声点(或异常值)。转到第4步。笔记
dbscan如果噪声点稍后满足所设定的约束,可以重新分配噪声点到群集埃斯利昂和别人从其他一些点X.群集的边界点发生重新分配点的过程。否则,将当前点标记为属于群集的核心点C.
迭代每个邻居(新的当前点)并重复步骤2,直到未发现任何新邻居,可以将其标记为属于当前群集C.
选择下一个未标记的点
X作为当前点,并增加群集计数1。重复步骤2-4,直到所有点
X被标记为。
如果两个簇具有不同的密度并且彼此接近,即,两个边界点(来自每个簇的一个)之间的距离小于
埃斯利昂, 然后dbscan可以将两个集群合并为一个。每个有效的群集至少可能不包含
别人观察。例如,dbscan可以识别属于彼此相邻的两个集群的边界点。在这种情况下,算法将边界点分配给第一个发现的聚类。因此,第二个集群仍然是一个有效的集群,但它可以少于别人观察。
参考文献
[1]酯,M.,H.-P。Kriegel,J. Sander和X. Xiaowei。“一种基于密度为基于密度的噪声在大型空间数据库中发现群集的算法。”在第二届数据库与数据挖掘知识发现国际会议论文集,226-231。波特兰,或:Aaai Press,1996。
你也可以从以下列表中选择一个网站: