电脑视觉工具箱
Progettazione e Sperimentimozione di sistemi di Visione Arificiale,Visione 3D E Di Elaborazione视频
计算机视觉工具箱™fornisce algoritmi,funzioniê应用每拉progettazioneé金正日测试迪SISTEMI迪visione artificiale,visione 3D E双链elaborazione视频。È不可能性eseguire rilevamentoË跟踪二oggetti,nonchérilevamento,estrazioneÈconfronto二功能。È不可能性automatizzare我的工作流程二calibrazione每fotocamere singole,立体声ë鱼眼。每拉visione 3D,IL工具箱supporta LO 万博1manbetxSLAM visivoËCON nuvole迪本地人,拉visione立体声,拉struttura DAL MOVIMENTOËL'elaborazione迪nuvole迪本地人。乐应用二visione artificiale automatizzano我的工作流程二calibrazione二fotocamere编etichettatura二Verità酒店二基(地面实况)。
èCOSTIBILEADESTRARERILEVATORI DI OGGGETI Personzizati Utilizzando Algoritmi di Dee Deep学习E机器学习来自YOLO V2,SSD E ACF。Per la semmentazione semantica e delle istanze,è可能utilizzare allitmi di深度学习来自U-net E掩模R-CNN。IL Toolbox Fornisce Algoritmi di seggetaione e Rilevamento degli oggetti per Analizzare Le Immagini Che Sono Tropo Grandi MeSsere Messe在Memoria。I Modelli Pre-Adtritati Consentono di Rilevare Volti,Pedoni E Altri Oggetti Comuni。
Possibile Velocizzare Gli Algoritmi eSeguendoli Su GPU E Promicori Multicore。GLI Algoritmi Del Toolbox 万博1manbetxSupportano La Generazione Di Codice C / C ++ Per L'Integrazione Con Il Codice Esistente,La Protipazione桌面eSistemi Di Visione嵌入式。
Inizia Ora:

瓜尔达来GLI altri utilizzano计算机视觉工具箱



Rilevamento e Riconoscimento di Oggetti
Addestra,币值ēdistribuisci rilevatori迪oggetti来YOLO V2,更快的R-CNN,ACFË维奥拉 - 琼斯。视觉词的Esegui IL riconoscimento oggetti CON袋êOCR。Utilizza MODELLI预addestrati每rilevare volti,pedoniéaltri oggetti COMUNI。

Rilevamento di Oggetti Mediante更快R-CNN。
Semmentazione Semantica.
Segmenta Le Immagini e i Volumi 3D Classificando I Singoli Pixel E体Voxel Tryi Reti Quiri Segnet,FCN,U-Net E DeePlab V3 +。Urilitizza la semmentazione istle istanze每将mappe di secmentazione e Rilevare Istanze Uniche di Oggetti。

Semmentazione delle istanze con面具R-CNN。
Etichettatura diVeritàdi基地(地面真相)
Automatizza L'Etichettatura每il Rilevamento di Oggetti,La Semmentazione Semantica,La Semmentazione Delle Istanze e La Classificazione Delle现场枪械LE App Video Labeler E图像贴图仪E图像贴图

Etichettatura diVeritàdi基地(地面真相)Con L'App Video Labeler。
Calibrazione di Fotocamere onerole
Automatizza IL Rilevamento Della Scacchiera E Calibra Le Fotocamere针孔E Fisheye Con L'App Camera Calibrator。
Calibraione di Fotocamere立体声
Calibra Coppie立体声每个Calcolare LaProfonditàe ricostruire场面3d。
Slam Visivo E Odometria Visiva
Estrai La Struttura A街道Dal Movimento E Dall'odometria Visuale。

Struttura multivista一个partire DAL MOVIMENTO。

Rilevamentoècorrispondenza阿尔每LO SLAM visivo功能。
Visione立体声
Stima LaProfonditàericostruisci场景3d uterzzando coppie di fotocamere立体声。

Stima delleprofondità相对dei punti在Una Scena Utilizzando la Visione Stereo。
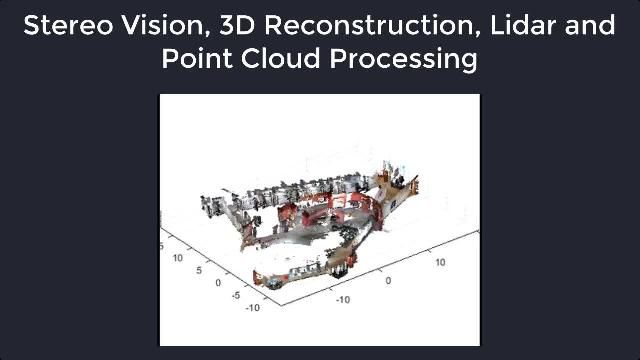
Elaborazione di Nuvole di Punti 3D E Lidar
Segmenta,Raggruppa,esegui il downample,Rimuovi Il Rumore,Registra E Adatta Le Forme Geometriche Con Di Di Nuvole di Punti 3D O Lidar。LIDAR Toolbox™fornisce截funzionalità每progettare,analizzareÈtestare我SISTEMI二elaborazione LIDAR。
I / O nuvole迪本地人ËLIDAR
Leggi,Scrivi E Visualizza Le Nuvole di Punti Da文件,Sistemi Lidar E Sensori RGB-D。

Uncerizzo del Visualizzatore di nuvole di punti每个visualizzare i dati delle di punti在流媒体上。
Registrazione迪nuvole迪本地人
Registra Le Nuvole di Punti 3D Con Gli Algoritmi正常分布变换(NDT),迭代最近点(ICP)E相干点漂移(CPD)。
Semmentazione e适用于di forme
Segmenta Le Nuvole di Punti在集群EADATTA Le Forme Geometriche Alle Nuvole di Punti。Semmenta L'Impianto di Terra in Dati Lidar Per Implicaioni di Guida Automatata e di robotica。

Una Nuvola di Punti Con La SegentazioneDella Nuvola di Punti的Identifipaione dei集群。
Rilevamento,Estrazione E Confronto Di Feature
Rileva,estraiēconfronta功能interessanti合格的斑点,contorniēangoli苏彪immagini。

Rilevamento di Un Oggetto在UNA Scena Canotoa Con Rilevamento,Estrazione E Confronto Di Features di Punti。
Registrazione di Immagini Basata Surle特色
Confronta乐功能于彪immagini每stimare乐trasformate geometriche TRA immaginiËregistra乐迪sequenze immagini。

全景creato CON registrazione basata sulle功能。
跟踪di oggetti.
Traccia Le Traiettorie Degli Oggetti da Un Frame All'Altro Nelle Sequenze视频。

Le Tracce Indemano Le Traiettorie Degli Oggetti Tracciati。
Stima del Movimento.
Stima Il Movimento Tra Flase Video Con IL Flusso Ottico,IL Confronto di Blocchi E IL Confronto di Modelli。

Rilevamento di Oggetti在Movimento Con Una Fotocamera Stazionaria。

Generazione di Codice.
属IL codice C / C ++,codice CUDAÈfunzioni MEX每funzioni二工具箱,CLASSI,系统对象E blocchi。
