Overview
探索如何建模和模拟多体dynamics using Simscape™ Multibody™. We show you how to define your multibody system using bodies, joints, constraints, and forces. You will be able to simulate multibody dynamics in systems such as robots, vehicle suspensions, construction equipment, and landing gear.
包括演示和解释:
- 定义用MATLAB®变量参数化的身体
- Assemble the bodies with joints
- 模拟Simulink®中的多体动力学万博1manbetx
- 查看模拟结果的3D动画
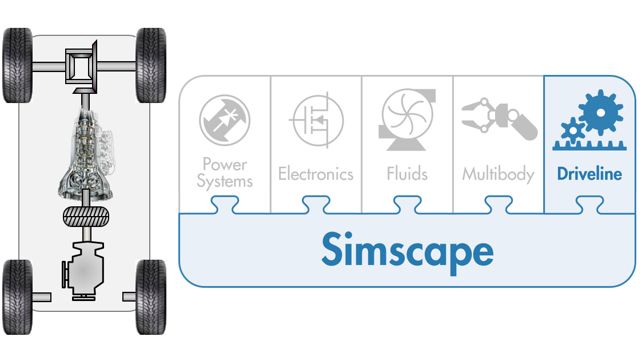
多体动力学的仿真始于您构建的模型。SIMSCAPE多体能够定义可以在其他系统中轻松重复使用的模块化机械组件。您用来为模型设置参数的MATLAB变量可以自动调整以满足设计要求,或在给定的范围内进行测试,以查看它们对系统性能的影响。将SIMSCAPE多体模型与Simscape组件和在Simulink建模的控制系统相结合,可以在单个模拟环境中模拟和分析整个系统。万博1manbetx