之前我们谈到用来控制永磁同步电动机矢量控制和汽车以不同的速度。在这个视频中,我们要关注空间矢量调制,最后一步在FOC算法生成所需的三相电压驱动电动机速度所需的。当你搜索这个话题,你会遇到不同的缩略词像SVM空间矢量调制,SVPWM空间矢量脉冲宽度调制,并为正弦脉宽调制变频调速。这两个术语可以互换,但他们同样的技术而正弦脉宽调制是一种稍微不同的方法来生成所需的三相电压的电动机。支持向量机变频调速有一些优势,因为它更有效地利用直流电压源并创建一个高电压输出到电机,这一点我们在后面会讨论到的视频。
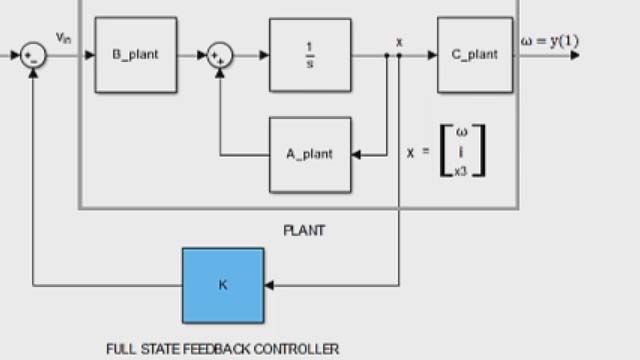
上次,我们解释如何利用克拉克和公园变换计算Id和智商电流和控制他们使用PI控制器所需的值。这个控制图在概念上帮助我们解释的不同组件FOC和它们是如何工作的。但是我们实现这个算法的方式略有不同,这看起来是这样的。让我们先讨论我们要实现空间矢量调制。我们的目标是创建这些三相电压所需驱动永磁同步电动机电动机。我们生成这些三相电压的方法是通过使用一个三相逆变器,以作为输入一个恒定的直流电压。正确将直流转换为交流电源,我们需要控制逆变器开关的开关状态及其转换序列。这就是空间矢量脉冲宽度调制。需要参考电压由公园逆变换和生成的责任周期发送给单片机PWM驱动程序。PWM驱动输出所需的三相逆变器的脉宽调制信号,然后生成所需的三相电压的电动机。 Note that space vector modulation eliminates the use of an inverse Clarke transform.
如果你想设计和模拟FOC算法和MATLAB仿真软件,有不同的选项,您可以使用实现空间矢量调制。万博1manbetx一种选择是使用PWM发生器可用块Simscape电气。块的参数,你可以选择PWM生成技术:正弦或空间矢量PWM。块的三相参考电压和直流母线电压和生成两个输出;第一个是脉冲来控制逆变器开关和第二个是调制波形。基于你附着在PWM发生器的逆变器,您可以使用其中一个输出。例如,对于高保真模型,您可以使用一个平均值逆变器块需要调制波形。或者,您可以使用一个三相逆变器,可以让你逆变器的开关效应模型,并要求快脉冲作为输入。
如果你想从你的电机控制算法生成代码并将其部署到嵌入式硬件,您可以实现空间矢量调制使用空间向量发电机与电动机控制Blockset块可用。这一块需要参考电压产生的公园里叶反变换,生成调制三相电压。在SVM与MATLAB仿真软件的更多信息,看看下面的链接提供的视频。万博1manbetx
从以前的视频你会记得,在船我们感兴趣的是建立一个不断旋转的定子磁场向量正交于转子磁场。解释背后的概念空间矢量调制,而不是旋转磁场向量我们会专注于一个静态的红色所示。正如我们前面所提到的,三相逆变器开关的开关状态确定电机的输出电压。清楚地看到这些开关状态,我们将使用这幅图,矩形表示三相逆变器的开关。红色意味着开关关闭,白色意味着它的开放。现在为空间向量,我们想在0度,创建转换配置是这样导致正电压阶段一和一个负电压阶段B和C,如果我们画一个简化版本的电路,我们可以看到,阶段A-to-neutral电压是直流电压源的2/3,而B和C阶段中性电压是直流电压源的1/3。这是我们如何表现这些电压空间矢量与电压向量图。正电压,空间向量方向正相位而负电压矢量点相反的方向的阶段。把所有三个向量给出了空间向量在0度,我们称之为V1。这里的空间矢量显示的状态; it is [100]. At each time, only one of the two switches along each inverter leg is closed giving us 8 different switching combinations. Six of them lead to these voltage vectors on the space vector diagram, each 60 degrees apart. These are also referred to as basic vectors. And the remaining two configurations give us zero or null vectors, which occur when either all the upper or all the lower switches are closed simultaneously. Since in this case, no current is flowing through the phases, no voltage is generated, and the resulting space vectors are null vectors shown on the origin.
现在我们知道如何控制三相逆变器的开关来创建空间电压矢量在这里显示的角度。但是我们真正感兴趣的是生成一个空间矢量在任何角度和在任何大小。这将让我们创建一个不断旋转电压矢量的大小。这可以通过使用脉宽调制。在前面的视频,我们讨论了PWM的平均效应。通过切换两个电压水平高频率之间我们可以得到平均输出电压。类似地,可以使用PWM平均空间向量。这个空间向量的角度由两个相邻之间切换控制基本向量和它的大小由切换控制基本和零向量。
为了更好的理解空间矢量脉宽调制是如何工作的,我们将使用这个动画。洋红色矢量电压向量我们创建并称为参考向量。我们生成这个参考向量的方式是通过切换之间的两个相邻基本向量红色所示。为了更好地理解我们的意思是,让我们放慢动画和重点发生了什么在每一个部门。这里的电压矢量,我们想创建在这个部门。首先,我们发现基本向量相关的部门,在这种情况下,V1和V2,然后切换两个向量合成参考矢量。这是空间矢量脉冲宽度调制的基本思想。如果参考向量在另一个部门,我们仍然遵循相同的逻辑并选择基本向量根据部门和替代它们之间平均参考向量。如果仔细观察,您可能已经注意到,在一些实例中,我们没有看到任何基本的向量,这样一个或这一个。了解在这段时间里发生的实例,让我们看看如何改变逆变器开关的状态。 This animation reveals that when no basic vectors are present, we’re actually in a null state. So, the switching pattern doesn’t only consist of the basic vectors, in this case, V3 and V4, but it also includes the null vectors V0 and V7. Both null vectors result in zero volts on motor terminals. So, does it really matter which one we use in the switching pattern? The answer is yes; it matters and here’s why. Let’s focus on the switching pattern for a second. While we transition from the null vector V0 to V3, we only change the states of the switches along phase B while we keep the rest of the switches at the same state. The same is true when we transition from V3 back to V0. However, if we used the other null vector during this transition, then we would need to change the states of the switches both along phase A and phase C. This would cause a larger switching loss in the inverter. Similarly, for this part of the switching pattern where we need to transition between V4 and one of the null vectors, we choose V7 because that configuration reduces the switching loss in the inverter.
现在我们理解零向量的选择,让我们从不同的角度看问题。这个动画代表另一种可视化的空间矢量调制。在左边,它向我们展示了高侧开关阶段积累的准时,B和C在每个部门。让我们先在这里停留下,试图解释我们所看到的。正如我们之前所讨论的,对该行业参考向量,切换顺序是这样的,它包括这些国家。安排他们垂直帮助我们看到常见的开关模式在不同的电压矢量。我们立即注意到,大部分时间花在B阶段高状态,而是重复5 7电压向量。这是紧随其后的是C阶段最后一个阶段,只有成为由于零向量V7。如果我们现在播放动画,我们可以确认大部分时间花在黑洞或B高,其次是CH最后啊,我们只花最少的时间和V7中由于零向量。对于其他行业,可以做一个类似的运动就像我们在这里完成估计累积的接通时间不同的阶段。
让我们回到我们之前的动画。你可能已经注意到的另一个重要的事就是我们花在每个向量变化的时间。如果我们想要创建的参考向量是接近一个相邻向量,然后我们花更多的时间在这个向量。如果参考向量是正确的在中间的两个相邻向量,然后我们在每个向量相等的时间。让我们开始动画和监控V1和V2的准时时间。现在,参考向量接近V1,所以我们花更多的时间在V1比V2。参考向量过后30度,它变得更接近V2,我们花更多的时间在V2。同样,让我们来看看影响零状态的持续时间平均电压向量。零向量的持续时间影响电压矢量的大小。让我们来比较一下这两个动画。 For a voltage vector that is larger in magnitude, we spend less time in the null state; however, if we increase the duration of the null state, then we end up with a voltage vector that is smaller in magnitude.
最后,我们将讨论如何不同于空间矢量调制正弦脉宽调制技术,我们前面提到的。这里的动画展示空间矢量PWM和正弦脉宽调制的工作。他们的工作原理非常相似。只有细微差别的切换时间。虽然小,但这种差异显著影响这些不同的技术所产生的信号。产生的调制波形空间矢量PWM双驼峰的特点,它们看起来像在正弦脉宽调制正弦波。
这两种技术产生正弦三相电压,但在空间矢量PWM调制波形的形状让我们充分利用直流电压源。在这里,1伏特直流电压源。如果我们仔细观察电压输出,我们会看到空间矢量PWM使用100%的正弦PWM电压源而总线利用率在86.6%导致三相电压与振幅小于1伏特。
让我们结束这一节我们看到的。我们介绍了基本和零矢量和它们之间如何替代合成电压矢量在一定的角度和一定大小。我们已经讨论了零矢量的选择逆变器的开关损失降到最低。最后,我们表明,空间矢量PWM让我们在正弦PWM总线利用率提高13.3%。空间矢量调制的更多信息,请查看下面的链接的视频。