基于模型设计的电子长板电机控制器的设计与制作
作者:Arno Bergmann博士,波鸿市应用科学大学
当我看到我的研究生们在比赛谁能在他们制作的电动滑板上保持最高的平均速度时,我知道我已经达到了他们项目中最重要的两个目标。他们不仅深刻理解了基于模型的设计原则,而且从中获得了很多乐趣。
Kevin Leiffels和Raphael-David Volmering设计并制造了e-longboard,作为我的电驱动和场向控制(矢量控制)课程的期末项目。由两个独立的直流无刷电机(bldc)供电,长板可以携带一个骑手长达25公里(15.5英里),最高速度超过40公里/小时(25英里/小时)(图1)。

图1。凯文·雷菲尔斯正在测试电子长板。
基于模型设计的实践项目的价值
学生通过完成实践项目比听讲座获得对工程概念更深的理解。即使是在考试中取得优异成绩的学生,也不能真正理解诸如电机磁场导向控制等概念,除非他们将这些概念应用到现实世界中。
基于模型的设计使学生能够在有限的时间内处理有意义的项目。例如,Raphael在一个学期内完成了e-longboard的印刷电路板设计,而Kevin则设计、实现和测试了控制器。Kevin生成了超过15000行代码——比他一个学期用手写出来的代码还要多。
波鸿中学获得了总学术人数(TAH)许可证,这对学校来说是一个重要的里程碑,对我的课程也是一个福音。学生可以自由使用MATLAB®和仿真软万博1manbetx件®负责实验室内外的任务。这种灵活性是非常激励人的。MATLAB和Simu万博1manbetxlink是工业标准工具,学生们知道,要发展工业所需的技能,他们需要更多的工具练习,而不仅仅是在实验室工作。TAH许可证还简化了我的工作,因为我不再需要跟踪各个许可证。
建立需求
对于所有的学生项目,我都建立了一套基本要求,然后让学生们提出自己的想法。e-longboard项目必须包括一个电源设备,两个独立的电机没有机械连接,以及一个DSP,在其上实现面向现场的控制(图2)。项目的控制部分必须具有挑战性,但足够简单,学生可以在一个学期内完成。每个学生必须使用基于模型的设计。在我看来,基于模型的设计是控制系统开发的最先进技术,因为它能够早期和彻底地验证设计,低实现成本,可移植性到多个硬件平台,并缩短开发时间。

在基于模型的设计成为一门必修课之前,学生们并不了解实际工程项目是如何进行的。例如,他们通常从预先打包的第三方电机控制器开始,将几行C代码组合在一起使电机旋转,然后直接构建系统的其余部分进行试错测试。当他们完成时,他们会发现系统不能满足他们的电力需求或满足所有的实时需求。因为他们没有通过模拟验证他们的设计,他们只是在发现这些问题时为时已晚。
除了基本的项目要求外,学生们还包括了一些特定于电子长板的要求。除了规定一次电池充电的最小距离外,这些要求还规定了最大制动距离和e-longboard需要能够爬上的最小山坡坡度。
控制器的设计与实现
磁场导向控制的主要设计挑战是在电机中保持转子和定子磁场之间的90°角。除了最小化磁通的变化以实现快速瞬态响应外,保持这个角度可以使给定电流的电机转矩最大化。Kevin使用霍尔传感器测量转子位置,这是场向控制和板的速度控制环的关键输入。
Kevin的控制器设计基于MathWorks中的一个面向字段的控制项目®网络研讨会。该示例包括一个用于控制三相永磁同步电机(PMS万博1manbetxM)的速度和转矩的Simulink模型,该模型使用Simscape Electronics™建模(图3)。我们发现该示例是一个面向场控制的良好实现。

从mathworks.com下载示例项目后,Kevin修改了e-longboard的参数,删除了不需要的部分,并添加了一些功能。在Simulink中运行了模拟之后,Kevin使用了Emb万博1manbetxedded Coder®为该板的TI F28069微控制器生成C代码。在这一点上,他开始评估系统的实时响应,看它是否满足他建立的实时需求。
凯文和拉斐尔基本上是单独工作,每周见我一次,这样我就可以监督他们的进展。在这个项目中,Kevin运用并扩展了他在波鸿中学早期控制设计选修课中所学的基于模型设计的MATLAB和Simulink基础知识。万博1manbetx他依靠MathWorks的技术支持来解决他遇到万博1manbetx的任何技术问题,这使他能够在我很少的帮助下工作。
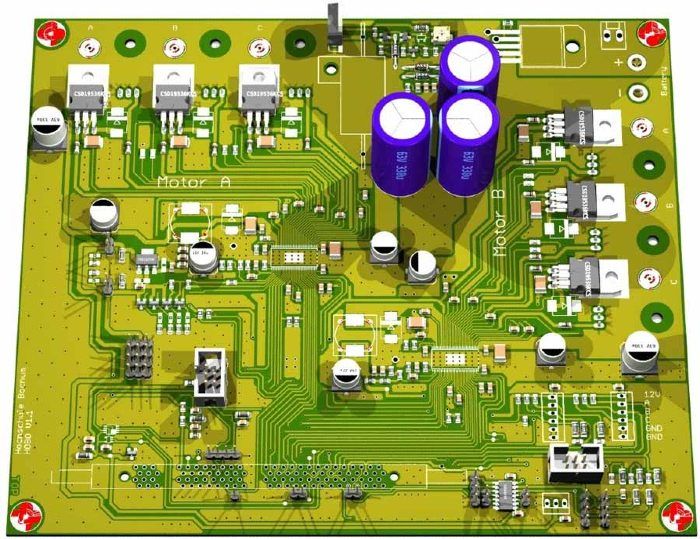
当e-longboard的其余部分被构造好,印刷电路板也准备好了(图4),Kevin和他的同学开始在波鸿HS校园内外进行测试运行。
凯文绕着附近的一个湖骑行了25多公里,以测试冲浪板的续航能力。没过多久,学生们就开始比赛,看谁能在保持最高平均速度的情况下最快耗尽电池。在测试运行之后,Kevin对运行期间捕获的指标进行了后期处理。例如,为了可视化e-longboard的速度响应,他在MATLAB中创建了一个期望速度和实际速度的组合图(图5)。

学生和课程的下一步
当Kevin完成他在HS Bochum的学业后,他开始在一家使用基于模型设计的工程公司工作。当公司得知凯文在电子长板上取得了成功时,他们当场就雇用了他。
Kevin学到的最有价值的一课是在实际实现之前通过建模和模拟尽可能彻底地验证需求的重要性。他现在工作的公司将支持我们即将使用的Simulink验证和验证™(在R2017b过渡万博1manbetx),因为他们也在寻求在开发的早期阶段验证需求。万博1manbetx
我正在计划为下一组参加现场导向控制课程的学生做一些改变。我仍然需要实践项目与基于模型的设计,我将鼓励更多的学生建立一个增强版的电子长板。明年的课程版本将更加强调使用Simulink验证和验证、状态流的需求、逻辑模式和物理建模万博1manbetx®,以及Simscape Electronics™。
我计划用这块黑板来激励明年的学生。我将把董事会带到课堂上,让学生们在外面进行一次试驾,以激发他们的兴趣,然后他们前往实验室开始使用基于模型的设计和面向现场的控制来开始他们自己的项目。
发布于2016 - 92969v00
查看相关功能的文章
您也可以从以下列表中选择网站: