利用行星星历表和ECI到AER转换估算太阳8字曲线
这个例子展示了如何估计8字曲线。8字曲线是表示太阳相对于其在天球上的平均位置与地球表面特定地理位置的角度偏移的变化的曲线。在这个例子中,8字曲线是相对于英国格林尼治的皇家天文台估计的。在估计之后,该示例绘制了8字曲线。
方法下载的数据aeroDataPackage函数。
确定一年中计算太阳8字曲线的日期
指定计算8字曲线的日期。在本例中,这些日期的范围从2014年1月1日到UTC中午的2014年12月31日。
Dv = datetime(2014,1,1:365,12,0,0);dvUTC = [dv.]年的dv。月的dv。天的dv。小时的dv。分钟' dv.Second '];
计算太阳的位置
使用planetEphemeris函数来计算太阳的位置。在这个例子中:
的tdbjuliandate函数计算动态重心时间(TDB)的儒略日期。
的tdbjuliandate函数需要地球时间(TT)。
从UTC计算以秒为单位的世界时需要协调世界时(UTC)和国际原子时(TAI)的差值。
2014年,这一差距(dAT)为35秒。
地球时间(secTT)的近时是dAT + 32.184秒。
以年、月、日、时、分、秒为单位的地球时间包含在dvTT数组中。
dAT = 35;secTT = dAT + 32.184;dvTT = dv + secTT/86400;
在地球时间的基础上,使用dvTT数组中。
jdTDB = tdbjuliandate([dvTT.]年的dvTT。月的dvTT。天的dvTT。小时的dvTT。分钟' dvTT.Second ']);
确定这些日期太阳的位置:
posSun = planetEphemeris(jdTDB,“地球”,“太阳”) * 1000;
计算UTC与主要世界时(UT1)之间的差值
使用UTC的修改后的儒略日期,计算UTC和UT1之间的差值deltaUT1。
mjdUTC = mjuliandate(dvUTC);dUT1 = deltaUT1(mjdUTC);
天体中间极的极移与位移计算
使用修改后的儒略日计算国际标准时间的极移和位移。
PM = polarMotion(mjdUTC);dCIP = deltaCIP(mjdUTC);
说明英国格林尼治皇家天文台的位势位置
指定用于估计8字曲线的位置的位势位置。在本例中,该位置是格林威治皇家天文台的纬度、经度和海拔(北纬51.48度,西经0.0015度,海拔0米)。
LLAGreenwich = [51.48,-0.0015,0];aer = eci2aer(posSun,dvUTC,repmat(LLAGreenwich,length(jdTDB),1),...“deltaAT”, dAT *(长度(jdTDB), 1),“deltaUT1”dUT1,...“PolarMotion”点,“dCIP”dCIP);
指定要绘制的8字曲线的年份中的天数
在8字曲线上,您可以在8字曲线的年份中绘制感兴趣的天数。这个例子描绘了:
2014年每月的第一天。
夏至和冬至。
春分和秋分。
想知道2014年每个月的第一天:
aerFirstMonth = aer(dvUTC(:,3)==1,:);
要获得二至点和二分点(2014年为3月20日,6月21日,9月22日,12月21日):
solsticeEquinox =[爱尔兰(dvUTC (:, 2) = = 3 & dvUTC (:, 3) = = 20, 1:2);...aer(dvUTC(:,2)==6 & dvUTC(:,3)==21, 1:2);...aer(dvUTC(:,2)==9 & dvUTC(:,3)==22, 1:2);...aer(dvUTC(:,2)==12 & dvUTC(:,3)==21, 1:2)];
阴谋的结果
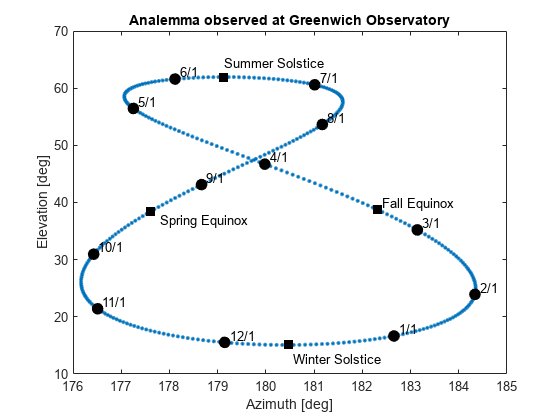
画出8字曲线。沿着8字曲线,全年的情节点,每月的第一天,春分和至点。
firstDays = (12:-1:1) +“/”+ 1;F =数字;情节(aer(: 1)、爱尔兰(:,2),“。”,...solsticeEquinox (: 1), solsticeEquinox (:, 2),“ks”,...aerFirstMonth (: 1), aerFirstMonth (:, 2),“柯”,...“MarkerSize”,8,“MarkerFaceColor”,“k”);标题(“格林威治天文台观测到的八字曲线”);包含(的方位(度));ylabel (的海拔(度));轴([176185、10、70])文本(aerFirstMonth(: 1) +。1, aerFirstMonth(:,2)+1.2, firstDays,“颜色”,“k”,“HorizontalAlignment”,“左”);文本(solsticeEquinox(1,1) +。2, solsticeEquinox -1.5(1、2),“春分”,“颜色”,“k”,“HorizontalAlignment”,“左”);文本(solsticeEquinox (2, 1), solsticeEquinox (2, 2) + 2.5,“夏至”,“颜色”,“k”,“HorizontalAlignment”,“左”);文本(solsticeEquinox(3,1) +。1, solsticeEquinox (3 2) + 1.2,“秋分”,“颜色”,“k”,“HorizontalAlignment”,“左”);文本(solsticeEquinox(4,1) +。1, solsticeEquinox (4,2) -2.5,“冬至”,“颜色”,“k”,“HorizontalAlignment”,“左”);
您也可以从以下列表中选择一个网站: