モデル オブジェクトでの制御システム モデリング
モデル オブジェクトは、プラント、アクチュエータ、センサー、コントローラーなどの制御アーキテクチャの個々のコンポーネントを表すことができます。モデル オブジェクトを接続すると、複数要素の応答の組み合わせを表すブロック線図の統合モデルを作成できます。
たとえば次の制御システムには、単一ループ構成に配置されたプレフィルターF、プラントGおよびコントローラーCがあります。また、このモデルにはセンサーのダイナミクスSの表現もあります。
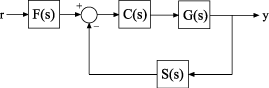
それぞれのコンポーネントはモデル オブジェクトとして表すことができます。各コンポーネントに同じタイプのモデル オブジェクトを使用する必要はありません。たとえば、プラントGは、s= -1 に二重極のある零点-極-ゲイン (zpk) モデルとして表し、Cは PID コントローラー、FおよびSは伝達関数として表します。
G = zpk([],[-1,-1],1); C = pid(2,1.3,0.3,0.5); S = tf(5,[1 4]); F = tf(1,[1 1]);
ここで、自分の制御システムまたは制御システム全体を表す、これらの要素作成モデルを組み合わせることができます。たとえば次のような開ループ応答SGCを作成します。
open_loop = S*G*C;
フィルター処理されていない閉ループ応答のモデルを作成するには、feedbackコマンドを使用します。
T = feedback(G*C,S);
rからyまでの閉ループ システム応答全体をモデル化するには、Tをフィルター伝達関数に組み合わせます。
Try = T*F;
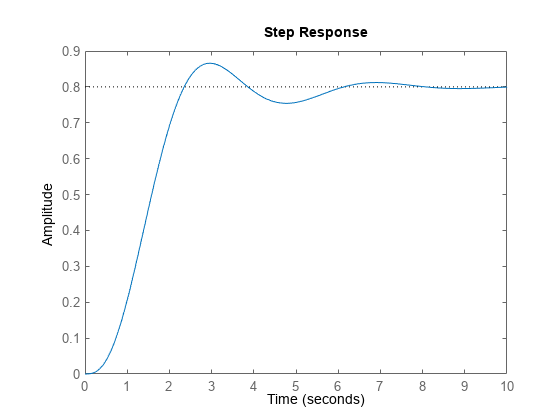
結果であるopen_loop、T、およびTryも線形モデル オブジェクトです。それらに Control System Toolbox™ の制御設計および解析コマンドを適用できます。たとえば、システム全体のステップ応答をプロットします。
stepplot(Try)
数値LTIモデルを組み合わせると,その結果の数値 LTI モデルは統合システムを表します。結果のモデルは、組み合わされたコンポーネントのオリジナル データを保持しません。たとえば、Tは、Tを作成するために組み合わされたコンポーネントG、C、およびSのダイナミクスを個別に記録していません。
参考
関連する例
詳細
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)