このペ,ジの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
補償器の離散化
この例では,複数の離散化手法を使用して補償器を連続時間から離散時間に変換し,周波数領域の良好な一致が得られる方法を特定します。
連続時間で補償器を設計し,その後でデジタル実装のためにこれを離散時間に変換する必要が生じることがあります。その場合,離散化の際に性能と安定性要件に必要な周波数領域特性を保持するようにします。
次の制御システムでは,Gは約3 rad/sで鋭い共振をも連続時間の2次システムです。
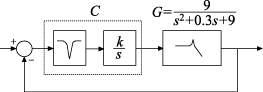
このシステムの1の有効なコントロラとして,積分器と直列のノッチフィルタがあります。このコントロ,ラ,のモデルを作成します。
Notch = tf([1,0.5,9],[1,5,9]);积分= pid(0,0.34);C =积分*缺口;bodeplot (C)
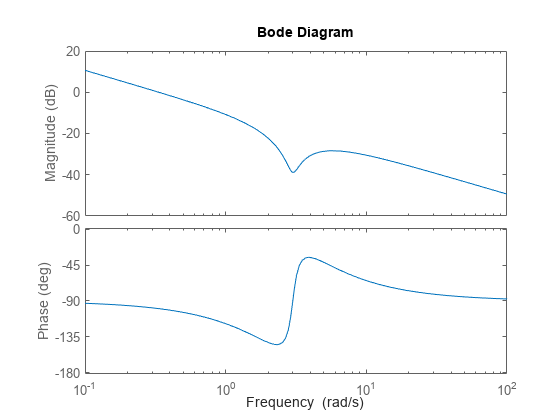
3 rad/sを中心としたノッチフィルタ,は,Gの共振の効果を抑えます。この構成を使用すると,高速の全体の応答に高いル,プゲ,ンを使用できます。
補償器を離散化します。
Cdz = c2d(C,0.5);
汇集コマンドでは,複数の異なる離散化手法がサポ,トされています。このコマンドには手法が指定されていないため,汇集は既定の方法であるゼロ次ホ,ルド(zoh)を使用します。ZOHメソッドでは,離散化された補償器の時間領域応答が,各タイムステップの連続時間応答に一致します。
離散化されたコントロラCdzのサンプル時間は0.5秒です。実際には,選択したサンプル時間は,コントローラーを実装するシステムにより,あるいは制御システムの帯域幅により制約を受けることがあります。
CおよびCdzの周波数領域応答を比較します。
bodeplot (C, Cdz)传说(“C”,“Cdz”);
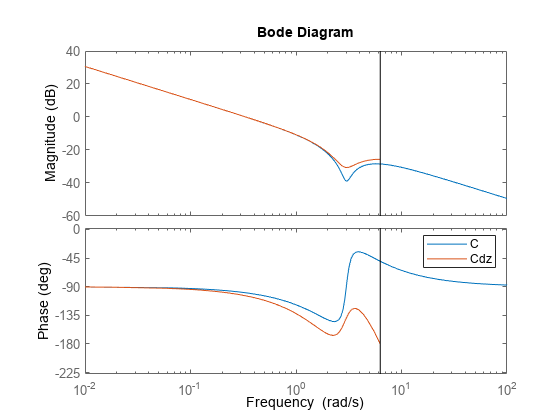
縦の線は,ナ (ここで, はサンプル時間)をマ,クします。ナ▪▪▪▪キスト周波数付近では,離散化された補償器の応答は,連続時間応答に相対して歪みます。この結果,離散化されたノッチフィルタ,がプラントの共振を正しく抑制しないことがあります。
これを修正するため,Tustinメソッドを使用して補償器を離散化し,ZOHの結果と比較します。Tustin 離散化手法では、しばしば周波数領域において ZOH メソッドよりも良好な一致が得られます。
Cdt = c2d(C,0.5,“tustin”);Plotopts = bodeoptions;plotopts。Ylim = {[-60,40],[-225,0]};bodeplot (C Cdz Cdt plotopts)传说(“C”,“Cdz”,Cdt的)
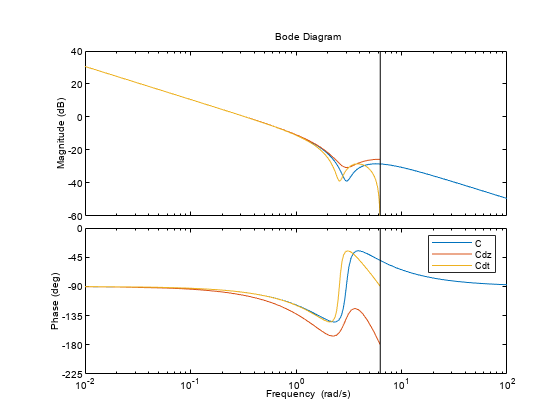
Tustinメソッドではノッチの深さが保持されます。ただしこのメソッドでは,多くのアプリケ,ションでは使用できない周波数シフトが起こります。周波数シフトを修正するには,ノッチ周波数を双一次変換のプリワ,ピング周波数に指定します。
周波数プリワ,ピング付きのTustinメソッドを使用して補償器を離散化し,結果を比較します。
discopts = c2dOptions(“方法”,“tustin”,“PrewarpFrequency”, 3.0);Cdtp = c2d(C,0.5,discopts);bodeplot (C, Cdt, Cdtp plotopts)传说(“C”,Cdt的,“Cdtp”)
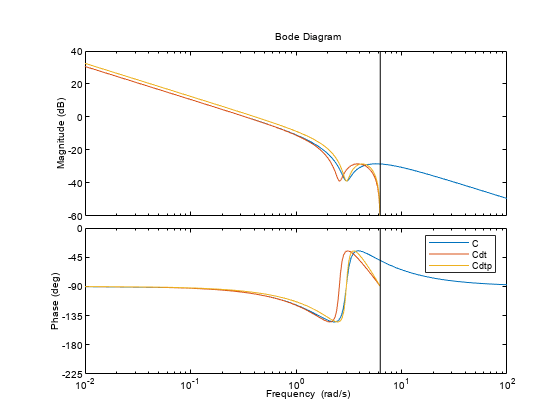
この離散化手法以外に追加の離散化オプションを指定するには,c2dOptionsを使用します。ここでは,離散化オプションセットdiscoptsでTustinメソッドとプリワ,プ周波数の両方を指定します。プリワ,プ周波数は3.0 rad/sで,補償器応答のノッチの周波数です。
周波数プリワーピング付きのTustinメソッドを使用すると,プリワーピングのないTustinよりも高い周波数応答の一致が得られます。
参考
関数
ラ▪▪ブエディタ▪▪タスク
関連するトピック
您也可以从以下列表中选择一个网站: