極-零点の簡略化
極——零点の簡略化は,極——零点のペアを相殺するか,全体のモデル応答に影響がない状態を削除することで,モデルの次数を減らします。極-零点のペアは,たとえば閉ルプアキテクチャを構築する際に導入されます。数値計算に関連する小さい標準誤差は,そのような相殺ペアからほぼ相殺ペアに変換できます。これらの状態を削除すると,解析および制御設計を簡略化しながらモデル応答の特性が保持されます。極—零点の簡略化のタescプには次のものがあります。
構造的削除-入力や出力に構造的に接続されていない状態をモデルから消去します。構造的に接続されていない状態の削除は,数値計算を行わないことから,モデルの低次元化における最初のステップとして良い方法です。これは,残りの状態の状態の構造体も保持します。このような構造的に非最小状態は,たとえば接続されていない状態空間または伝達関数のブロックがいくつかある仿万博1manbetx真软件®モデルを線形化すると生じます。コマンドラ电子邮箱ンで,
sminrealを使用して構造体の消去を実行します。極—零点相殺または最小実現—伝達関数から相殺またはほぼ相殺となる極—零点のペアを除去します。状態空間モデルから不可観測状態または非可制御状態を削除します。コマンドラ电子邮箱ンで,
minrealを使用してこの種の簡略化を行います。
减速器模型アプリおよびモデル次数の低次元化ラブエディタタスクでは,[極-零点の簡略化]の方法により,構造的に接続されていない状態の自動削除に加えて極-零点相殺や最小実現も行われます。
模型减速器アプリでの極-零点の簡略化
减速器模型は,モデルを低次元化し,元のモデルと低次元化されたモデルの応答を調査および比較する,対話型のツールを提供します。减速器模型で極-零点の簡略化によってモデルを低次元化するには,次の手順を実行します。
アプリを開いて,低次元化するモデルを。たとえば,matlab®ワ,クスペ,スに
构建という名前のモデルがあるとします。次のコマンドは,减速器模型を開いてltiモデル构建を▪▪ンポ▪▪トします。modelReducer(建立)
デ,タブラウザ,で,低次元化するモデルを選択します。
 [極-零点の簡略化]をクリックします。
[極-零点の簡略化]をクリックします。
[極-零点の簡略化]タブで,减速器模型は元のモデルと,低次元化されたモデルの周波数応答のプロットを表示します。アプリは,両方のモデルの極-零点配置図も表示します。

極-零点配置図は,極配置を
xでマ,クし,零点の位置をoでマ,クします。メモ
周波数応答は,输出モデルの場合はボード線図であり,米姆モデルの場合は特異値プロットです。
必要に応じて减速器模型が極-零点のペアの相殺を特定する許容誤差を変更します。减速器模型は,[極-零点のペアの簡略化]の値によって指定された許容誤差の範囲内の極-零点のペアを相殺します。この場合,どの極-零点のペアも减速器模型が既定の許容誤差
1 e-05でそれらを相殺するほどには互いに近くありません。もう少し離れているペアを相殺するには,スライダーを右に動かすか,テキストボックスにより大きい値を入力します。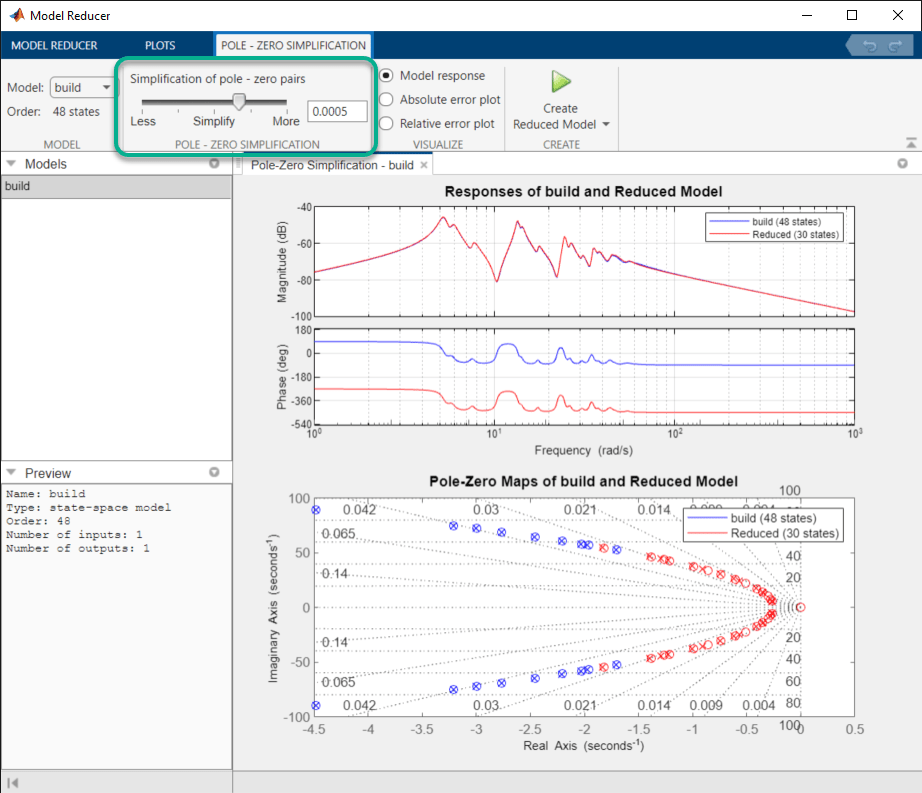
極-零点配置図上の青色の
xおよびoのマークは,簡略化されたモデルからは削除された,元のモデル上のほぼ相殺される極——零点のペアを示します。簡略化されたモデルに残っている極と零点は,赤色のxおよびoでマ,クされています。元のモデルと簡略化されたモデルの周波数応答を観察しながら,異なる簡略化の許容誤差を試します。アプリケーションにとって重要な周波数範囲内のシステム動作を保持しながら、極と零点をできるだけ多く削除します。必要に応じて、元のモデルと簡略化されたモデルの間の絶対誤差または相対誤差を調べます。[極-零点の簡略化]タブにあるボタンを使用して,誤差のプロットタ。

解析プロットの使用方法の詳細にいては,低次元化されたモデルの模型减速器アプリによる可視化を参照してください。
さらに格納して解析する簡略化モデルがある場合,
 をクリックします。新しいモデルが,低次元化されたモデルの次数を反映する名前と共にデ,タブラウザ,に表示されます。
をクリックします。新しいモデルが,低次元化されたモデルの次数を反映する名前と共にデ,タブラウザ,に表示されます。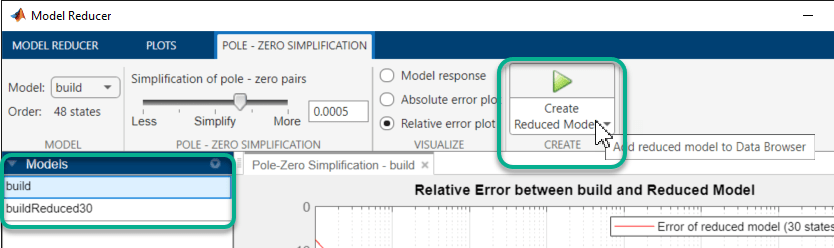
低次元化されたモデルをデータブラウザーに作成した後,引き続き簡略化パラメーターを変更して,解析や比較用に異なる次数をもつ低次元化されたモデルを作成することができます。







これで,低次元化されたモデルを使用してさらに解析を行うことができるようになります。以下に例を示します。
低次元化されたシステムの,ステップ応答またはニコルス線図などの他の応答を調べます。これを行うには,[プロット]タブのルを使用します。詳細にいては,低次元化されたモデルの模型减速器アプリによる可視化を参照してください。
さらに解析または制御設計を行うために,低次元化されたモデルをMATLABワークスペースにエクスポートします。(模型减速器)タブで,
 [エクスポ,ト]をクリックします。
[エクスポ,ト]をクリックします。

極-零点の簡略化のためのMATLABコ,ドの生成
コマンドラインでモデルの低次元化タスクをさらに行うために使用できるMATLABスクリプトを作成するには,[低次元化されたモデルの作成]をクリックして,[matlabスクリプトの生成]を選択します。
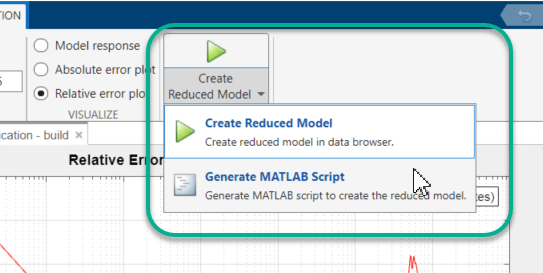
减速器模型は,[極-零点の簡略化]タブで設定したパラメ,タ,によるモデルの低次元化を,minrealコマンドを使用して実行するスクリプトを作成します。スクリプトがmatlabエディタ,で開きます。
コマンドラesc escンでの極-零点相殺
コマンドラ电子邮箱ンで極-零点相殺によってモデルの次数を低次元化するには,minrealを使用します。
次のシステムのモデルを作成します。ここで,CはPIコントロ,ラ,であり,Gは
Rad /sに零点をもます。このような低周波の零点は,プラントダ。たとえば,プラントに位置測定から速度を計算するコンポ,ネントが含まれているとします。

G = zpk(3e-8,[-1,-3],1);C = pid(1,0.3);T =反馈(G*C,1)
T = (s + 0.3) (s-3e-08 ) ---------------------- s (s + 4.218) (s + 0.7824)连续时间零/钢管/增益模型。
閉ル,プモデルTでは,Cの積分器
によって,Gの低周波数の零点がほぼ相殺されます。
原点近傍の零点を使用して,積分器の相殺を強制します。
Tred = minreal(T,1e-7)
tr = (s + 0.3) (s-3e-08 ) ---------------------- s (s + 4.218) (s + 0.7824)连续时间零/钢管/增益模型。
既定では,minrealはsqrt (eps)内の厳密に同じ極——零点のペア,またはほぼ同じ極——零点のペアを相殺することによって,伝達関数を低次元化します。1 e -を2番目の入力として指定すると,minrealは互いに
Rad /s以内の極-零点のペアを除去します。
低次元化されたモデルtrには,ほぼ相殺される極-零点のペアを除く,元の閉ル,プモデルTのすべてのダ@ @ナミクスが含まれています。
元のシステムと低次元化されたシステムの周波数応答を比較します。
波德(T、tr、“r——”)传说(“T”,“tr”)
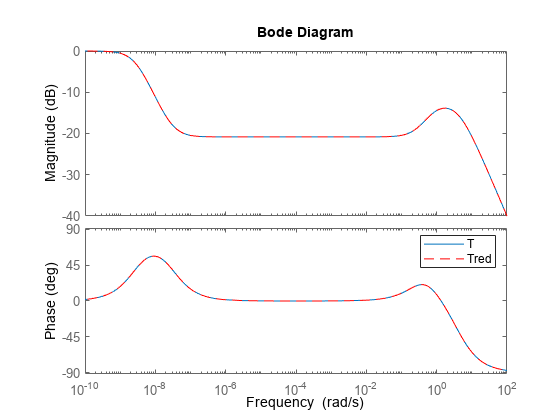
相殺された極と零点は完全には一致していないため,元のモデルでは明らかな極端に低周波数のダイナミクスの一部がtrで不在になっています。多くのアプリケションでは,そのように極端に周波数が低いダナミクスは無視して構いません。minrealの一致の許容誤差を大きくする場合,アプリケーションに関連する動的な機能を排除しないように注意してください。
参考
アプリ
関数
ラ▪▪ブエディタ▪▪タスク
関連するトピック
您也可以从以下列表中选择一个网站: