このペ,ジの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
カスケ,ドマルチル,プフィ,ドバック設計
この例では,制御システムデザナを使用して仿万博1manbetx真软件®控制设计™で2つのカスケードフィードバックループを調整する方法を示します。
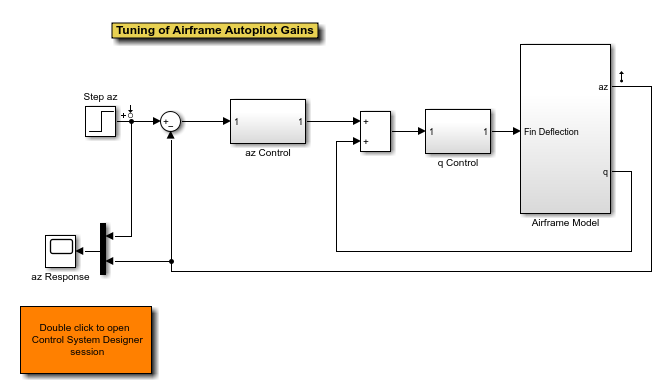
この例では,加速度コンポ,ネント(阿兹)が最大立ち上がり時間0.5秒の基準信号を追跡するように,機体モデルの2つのカスケードフィードバックループのコントローラーを設計します。この例のフィ,ドバックル,プ構造では,内側のフィ,ドバックル,プとして本体比(问)を,外側のフィ,ドバックル,プとして加速度(阿兹)を使用します。
機体モデルを開きます。
open_system (“scdairframectrl”)
2 .のフィドバックコントロラは次のとおりです。
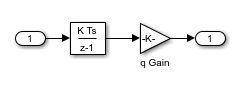
scdairframectrl / q控制—離散時間積分器およびゲaapl . cerンブロックが内側のル. cerプを安定化させます。
open_system (“scdairframectrl / q控制”)
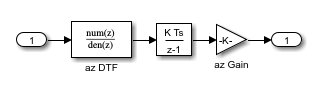
scdairframectrl / az控制—離散時間積分器,離散伝達関数,およびゲ。
open_system (“scdairframectrl / az控制”)
マルチル,プシステムにおけるル,プの分離
カスケードフィードバックシステムの一般的な設計手順では,最初に内側のループを設計し,次に外側のループを設計します。制御システムデザナでは,両方のル,プを同時に設計することが可能です。既定では,マルチル,プのフィ,ドバックシステムを設計する際はル,プ間の結合の影響が考慮されます。しかし2つのフィードバックループを同時に設計する場合,フィードバックループを分離する(つまり内側のループを調整するときに外側のループの影響を取り除く)ことが必要になります。この例では,外側のル,プ(阿兹)の影響を取り除いたうえで,内側のフィ,ドバックル,プ(问)を設計します。
制御システムデザ▪▪ナ▪▪の構成
制御システムデザナを使用してコントロ,ラ,を設計するには,以下を行わなければなりません。
調整するコントロ,ラ,ブロックを選択します。
表示する開ル,プ応答と閉ル,プ応答を作成します。
この例では,次を実行できます。
モデルの左下隅にあるサブシステムをダブルクリックして,事前に構成されている制御システムデザナセッションを起動します。
次の手順に従って制御システムデザナを構成します。
制御システムデザナを開くには,万博1manbetxSimulinkモデルの[アプリ]ギャラリ,で[制御システムデザaapl . aapl . cn]をクリックします。
[アキテクチャの編集]ダアログボックスの[ブロック]タブで,[ブロックの追加]をクリックします。[調整ブロックを選択]ダ▪▪▪アログボックスで,次のブロックを選択して(好的)をクリックします。
scdairframectrl/q控制/q增益scdairframectrl/az控制/az增益scdairframectrl/az Control/az DTF
[信号]タブで,万博1manbetxSimulinkモデルで定義されている解析ポントが[位置]として自動的に追加されます。
入力:
阿兹scdairframectrl /步骤- 出力端子 1出力:
scdairframectrl /机身模型- 出力端子 1

選択したブロックと信号を使用するには,(好的)をクリックします。
[デ,タブラウザ,]の[応答]セクションには以下の開ル,プ応答が含まれます。これらは制御システムデザナによって自動的に開ル,プ設計のフィ,ドバックル,プ候補として認識されます。
scdairframectrl/az Control/az DTFの出力端子scdairframectrl/az控制/az增益の出力端子scdairframectrl/q控制/q增益の出力端子
以下の各応答にいてグラフィカルなボドエディタを開きます。制御システムデザナで[調整法],[ボ,ドエディタ,]を選択します。次に,[編集する応答の選択]ドロップダウンリストから,対応する開ル,プ応答を選択し,[プロット]をクリックします。
scdairframectrl/az Control/az DTFの出力端子1の開ル,プ

scdairframectrl/q控制/q增益の出力端子1の開ル,プ

フィードバックシステムの閉ループ応答を表示するには,新規の入出力伝達関数の応答についてステッププロットを作成します。[新規プロット],[新規ステップ]を選択します。次に,[プロットする新規 Step] ダイアログ ボックスで、[プロットする応答の選択]ドロップダウンリストから[新規の入出力伝達の応答]を選択します。
入力信号としてscdairframectrl az / 1 /步骤を,出力信号としてscdairframectrl /机身模型/ 1を追加します。

[プロット]をクリックします。
外側のフィ,ドバックル,プの影響の排除
外側のル,プのボ,ドエディタ,プロット[LoopTransfer_scdairframectrl_az_Control_az_DTFのボ,ドエディタ,]で、振幅応答を上方にドラッグしてフィ、ドバックル、プのゲ、ンを増加させます。内側のル,プのボ,ドエディタ,プロット[LoopTransfer_scdairframectrl_q_Control_q_Gainのボ,ドエディタ,]も変化します。この変化の原因は,フィ,ドバックル,プ間の結合です。より体系的な方法としては,まず内側のフィードバックループを,外側のループが開いている状態で設計します。

内側のループの設計時に外側のループの影響を取り除くには,内側のループの開ループ応答にループ開始点を追加します。
[デ,タブラウザ,]の[応答]領域で,内側のル,プ応答を右クリックして[選択を開く]を選択します。

[開ルプ伝達関数]ダアログボックスで,ルプ開始点としてscdairframectrl/az Control/az DTF/1 .使用实例を指定します。(好的)をクリックします。

外側のルプのボドエディタプロットで,振幅応答をドラッグしてゲンを増加させます。ル,プは分離されているので,内側のル,プのボ,ドエディタ,プロットは変化しません。

これで,外側のル,プの影響がない,内側のル,プの設計を完了できます。また,内側のル,プの影響を考慮しながら同時に,外側のル,プを設計することもできます。
補償器の調整
制御システムデザナには,制御システムを調整する方法がいくか含まれています。
補償器エディタ,を使用して,各補償器のパラメ,タ,を手動で調整する。詳細にいては,補償器エディタ,を使用したS万博1manbetximulinkブロックの調整を参照してください。
開/閉ループボード線図,根軌跡またはニコルス線図の各エディタープロットを使用して,補償器の極,零点,ゲインをグラフィカルに調整する。[調整法]をクリックし,[グラフィカルな調整]の下でエディタ,を選択します。
時間領域と周波数領域の両方の設計要件を使用して補償器のパラメーターを最適化する(仿万博1manbetx真软件设计优化™ソフトウェアが必要)。[調整法]をクリックし,[最適化ベ,スの調整]を選択します。詳細にいては,在单回路控制器设计上实施时间和频率要求(万博1manbetxSimulink设计优化)を参照してください。
閉ルプ時定数などのパラメタに基づく自動調整を使用して,初期の補償器パラメタを計算する。[調整法]をクリックし,[pid調整]、[内部モデルコントロ,ル(imc)の調整]、[ル,プ整形](鲁棒控制工具箱ソフトウェアが必要),[lqg合成]のいずれかを選択します。
設計の完了
以下の補償器パラメ,タ,は設計要件を満たしています。
scdairframectrl/q控制/q增益:
K_q = 2.7717622
scdairframectrl/az控制/az增益:
K_az = 0.00027507
scdairframectrl/az Control/az DTF:
分子=[100.109745 -99.109745]分母= [1 -0.88893]
閉ル,プシステムの応答は次に示すとおりです。

万博1manbetxSimulinkモデルの更新
補償器のパラメ,タ,をS万博1manbetximulinkモデルに書き込むには,[ブロックの更新]をクリックします。その後,非線形モデルで設計をテストできます。
参考
関連するトピック
您也可以从以下列表中选择一个网站: