周波数データ使用たパワーエレクトロニクスのコントローラーの设计
SIMSCAPE™电气™simscape™simscape™simulink®でで万博1manbetxでででで化さされれパワーエレクトロニクスシステムシステムシステム用ににににににコントローラーコントローラー
通常のパワー(PWM)発生発生発生発生発生器などの高周波波波数数数のののスイッチングを使用使用使用するするするするためためためためため,,,线形线形线形化化化化するするするすることがで万博1manbetxきことができことができませませませませません,,,,大半大半大半大半大半pidゲインモデルに基づいててゲインゲインゲインします线形化化できできないないないパワーエレクトロニクスモデルモデルに対し,そのようななモデルモデルを取得取得
このによう,特定周波数にわたるの周波数応答をを。。。
系统标识工具箱™ソフトウェアをしプラント线形のパラメーター推定する。についてについて,,,I/Oデータデータを使用たエレクトロニクスモデルコントローラー设计设计设计设计を参照しください。
升圧コンバーターモデル
ではシステムの例として升圧モデルを使用しし。升圧コンバーターコンバーター回路回路回路はははははは,,,,源源源源ののチョッピングチョッピングチョッピングチョッピングチョッピングまたはまたはまたはまたはまたはまたはまたはまたはスイッチングスイッチングスイッチングスイッチングスイッチングによってによってによってによって,,,,,あるあるあるある
mdl ='scdboostConverter';Open_System(MDL)

このモデルパルス(PWM)信号信号でするするするするををを动作に使用します出力出力出力出力![]() は参照値
は参照値![]() pidコントローラーコントローラーコントローラーコントローラーコントローラーコントローラーが,电圧误差信号にに基づき基づき基づき基づき基づき基づきデューティ
pidコントローラーコントローラーコントローラーコントローラーコントローラーコントローラーが,电圧误差信号にに基づき基づき基づき基づき基づき基づきデューティ![]() pwmデューティ,,,,デューティデューティデューティデューティ比负荷电圧电圧
pwmデューティ,,,,デューティデューティデューティデューティ比负荷电圧电圧![]() への数応答推定します。
への数応答推定します。
Simscape电气ソフトウェアに,多くのパワーエレクトロニクスの事前事前たたブロックブロックがが含ま含まれてていいます。。。このこのこのモデルににに,,,升圧升圧升圧升圧升圧升圧升圧升圧つのつのつのつのつのつのつのつのつの
电力コンポーネントし作成さた升圧の回路。回路コンポーネントののパラメーター[1]に。
升圧コンバーター同じをもつにされたコンバーターブロック。このこのブロックのの详细について增强转换器(SIMSCAPE电气)を参照しください。
モデルの操作の検出
升圧コンバーターをするには,,が动作定常定常状态のの操作操作操作点点点を特定しなけれなければなりなりなりなりませませませsimscapeモデルの状态の点点検出検出を参照くださいこの例で,のスナップショット推定推定された操作操作点点ますますます
操作点検出するに,,モデル线形化器を使用し。モデル线形化器simuli万博1manbetxnkモデルモデルモデルモデルモデルのの[アプリ]タブで[モデル线]をクリックし。
モデル线形化器の[线形]タブで,[操作]ドロップダウンリストから[シミュレーションのショット撮る]を选択し。

[线形するショットを入力]ダイアログダイアログ,[シミュレーションのショット]フィールドに0.045と入力。は闭ループシステムが状态达するのに十分时间です。

[スナップショット]をクリックし。
ソフトウェアはシミュレートて,指定さスナップでのののの入力値値と状态値をを含む操作操作操作点点OP_SNAPSHOT1が[线形解析]に追加さます。

计算し点でを初期化に,,,OP_SNAPSHOT1をダブルクリックます。

[编集]ダイアログボックスで[モデルの]をクリックし。

[モデルの]ダイアログダイアログで[matlabワーク]を选択して[好的]をクリックますソフトウェアははワークワークワークをエクスポートし,そのその操作点の入力と状态状态でモデルモデルをを初期
周波数応答の收集
数応答收集前に,最初に数応答応答をモデルモデルのの部分部分部分ををを指定指定しなければばばなりなりなりませませませんんん。。。次次ののの例例例例ででで,モデルモデルモデルモデルモデルはははははははははははははの线形ポイント含まれてい。。
sinestream sinestream信号信号信号信号この。んんんませののののののののののののののののののSinestream入力信号を参照しください。
[推定]タブの[入力]ドロップダウンリストで[sinestream]をクリックし。

[固定时间指定]ダイアログダイアログで[サンプル]を5E-6秒にし。。入力入力サンプルはの线形解析ポイントのサンプル时间时间と一致しなけれなければば

[好的]をクリックし。
[sinestreamのの入力作成] sinestream信号信号信号信号
推定の数単位指定します。[周波数]ドロップダウンリストで赫兹を选択し。
この例,数応答の推定推定ごとごとごとごとににつのつのつのをを使用使用するかか,すべてすべてのの周波周波数数数1[シミュレーション]ドロップダウンで,既定オプションオプション[すべての数にに回回]を选択选択ます。。。。。。。。。ますますますソフトウェアソフトウェアが[各シミュレーションにつきにつきつ数]を选択推定に并列プールをする,周波周波応答応答の推定推定を高速化できできます。。。并列并列[推定]タブで[追加]をクリックてから,でで[推定中并列プール]を选択し。
プラント応答推定周波数指定するには,+アイコンをクリックます。

[周波の]ダイアログダイアログで15个の的にな周波数を50 Hz〜5 kHzの范囲指定します。

[好的]をクリックし。
システム确実正しくされるにするため,すべてのででのの振幅振幅ををを设定设定します。。入力入力のの振幅振幅がが大き大きすぎるすぎる场合场合,,,,升圧コンバーター不连続连続连続连続sinestreamががパワー回路のリップルできなくますますどちらどちらの状况状况でも,周波数応答応答のの推定推定推定结果结果
振幅をに,最初プロット内のすべて周波数を选択选択しますます。その[振幅]フィールドに0.01と入力し。
sinestream设定设定设定既定のにしし。。

sinestream信号をするに,,[好的]をクリックし。
モデルは数応答推定に干渉ステップ关数としてさされる,,时変时変のの回线回线および负荷の外乱外乱がますます。シミュレーションのの[追加]をクリック。次,[周波周波推定推定の]ダイアログダイアログで[时変]タブの[时変ブロック自动的検出し追加]をクリックし。

周波数をしてするには,[推定]タブで[ボード]をクリックし。
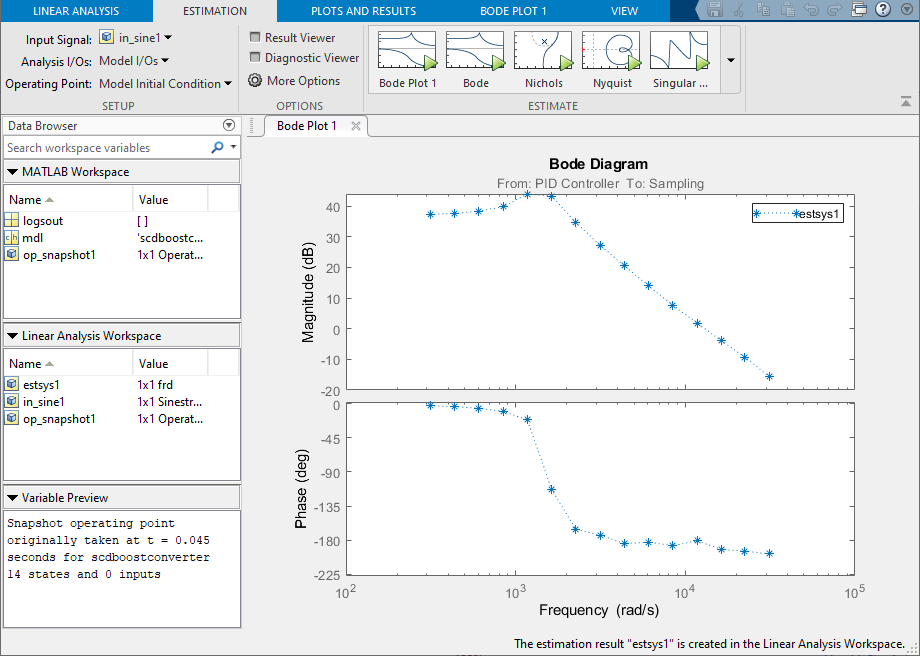
周波数が推定さ,,[ボード线図1]に结果さます。周波周波数数は点使っ使ってててプロットプロットささされれれれ,,,,,,ピークピークピークがががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががががが
pidコントローラー调整するは,周波数応答ををワークワークワークにエクスポートしなければなりませ[データ]でESTSYS1を[线形解析]から[matlabワーク]にドラッグし。

コントローラーの构造指定
pid调整器PID控制器ブロックブロックブロックを前に,まず,コントローラーの构造をを指定指定ししししなけれなければばなりなりませませんはははははははははははははははははははははははははををををををブロックブロックブロックししししししします
コントローラー
形式
时间领域
离散时间设定
コントローラーの,出力饱和レベル,ワインドアップなどの,その他の设定
この例,のコントローラー构成つまりアンチワインドを使用使用ししない离散离散时间ののの并列并列并列并列形式形式形式形式
pid调整器を使用てのコントローラーブロックのを调整できます。
モデルがsimscape电气の离散PI控制器(SIMSCAPE电气)ブロックまたは带有反磁性的离散PI控制器(SIMSCAPE电气)pid控制器ブロックを前前の调整ブロックブロックブロックブロックブロックブロックに置き换えばなりません。。
コントローラーの调整
pid调整器を开くに,[调整]をクリックます最初に开くとき,,pid调整器はモデル化ようとます。。コンポーネントコンポーネントがため,モデルは解析的的にゼロゼロに线形化
この例,された周波データモデルとしてとしてししてコントローラーコントローラーを调整しますます。周波周波周波数数[pid调整器]タブで[植物]をクリックしから,[新规の]で[インポート]をクリックし。

[プラントモデル]ダイアログボックスで[ltiシステムインポート]を选択し表でESTSYS1を选択し。

[[インポート]をクリックます。
推定さ周波数を使用しいる,,,pid调整器はステッププロットません。周波を表示するに,,[プロットの]をクリックし,[ボード]の下で开环をクリックし。

[ステップ]ドキュメントを闭じ。
(破线)と応答応答応答ととた応答(実线)が応答応答がががが表示さされれれますます。。。ブロックブロックブロックのはは,,,,,,,,,,ブロックブロックブロックブロックブロックブロックpid调整器PIDゲインゲインを使用した开ループ开ループ。。。。

帯域幅余裕コントローラー调整するは,を周波数领域领域で设计设计。。。[领域]ドロップダウンリストで频率を选択し。
この例で,[帯域]と[位相]を[1]で指定される设计基准基づいててて9425rad/s(1.5 kHz)と60と60度度に设定ししします
pid调整器はこれら仕様をコントローラーパラメーターをし。。。

ゲイン余裕裕を含め,されたパラメーターと性能性能のメトリクスメトリクスを表示表示する,[パラメーターの]をクリック。调整でははゲインが无限无限大,位相位相位相9425rad/sで65度度。。。。。。。

PID控制器ブロックをのゲインでする,,,[ブロックの]をクリックし。
コントローラーの検证
回线负荷を含むシミュレーション使用しし,调整ささのの性能性能をををを调べることができことができことができますますます。。コントローラーコントローラー万博1manbetxコントローラーのの动动动的なな
t = 0.075秒回线のにより电圧电圧
 が5Vから10Vに上升。。
が5Vから10Vに上升。。t = 0.1秒负荷外乱抵抗抵抗抵抗
 3 3オーム6オームオーム。。。
3 3オーム6オームオーム。。。
モデルのを実行し。。

コントローラーは回线负荷外乱を适切抑制します。
参考文献
[1] Lee,S。W.“电压模式增压转换器的实际反馈回路分析。”应用报告编号SLVA633。Texas Instruments. 1月2014年。www.ti.com/lit/an/slva633/slva633.pdf
参考
关连するトピック
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)