水タンク水位受动制御
この例で,“制御システム”simulink®万博1manbetxででででモデルれ线形プラントののコントローラーをを设计设计方法を说明ししますます。。次次の
补偿器调整のモデルとアプリ设定设定
受动性のを使用したたた次次器の调整
闭ループ非线形応答シミュレーションシミュレーション
制御システムのs万博1manbetximulinkモデル
watertank_comp_designモデルモデル図示さモデルモデルモデルモデルはタンクタンクの水位水位水位をを制御制御制御するするするフィードバックフィードバックループループををモデルモデルモデル化化化化しししてていいいますますます。。。。。。。。。。
mdl ='cst_watertank_comp_design';Open_System(MDL)

水箱サブ,水のダイナミクスモデル化します。上部からからタンクにに流れ込む流れ込む速度速度速度,,ポンプポンプポンプにに印加れた(v)に(v)に,タンクの(h)のののします。水流レートに平方根があるため,,このプラントプラントはは非非

水流のモデルは次のようなり。。。


ここで
 はタンク水の高さ
はタンク水の高さ はポンプ印加され电圧电圧
はポンプ印加され电圧电圧 はタンクの面积
はタンクの面积 および
および はタンクの流量タンク外へ流量关连关连たた定数
はタンクの流量タンク外へ流量关连关连たた定数





このシステム,以下により关数关数 では受动的。
では受动的。

受动性ベース制御
2つの,,つのつのに受动的システムシステムシステム および
および の负フィードバック接続は安定します。
の负フィードバック接続は安定します。

水システム的である,プラントモデル不正确であっ闭ループ闭ループの安定安定性性がが保证保证されるようコントローラーコントローラーをにに受动的にに
制御システム器使用し补偿器の调整
制御システム调整器控制器ブロックてブロックブロックを调整でき。。。
手顺1:制御システム调整器simulinkモ万博1manbetxデルモデルモデルモデルモデルのの[アプリ]タブの[アプリ]ギャラリーで[制御システム]をクリックし。
手顺2:[调整]タブの[ブロックの]ボタンからさたブロックを起动し。。

3:控制器ブロック[OK] [ok]をクリックます。ブロックは[调整调整]リストリストに表示ます

4:调整目标指定ます。次次次つつ主要目标目标ありあり。
水位の変化を追従する
コントローラーを受动する
[新规]ドロップダウンをクリックしにに[受动性]目标を追加ます。

控制器ブロックに适用ようこの目标をを构成し。。。これこれ入力信号をををををををををを“所需的水位”,,をををををををををブロックブロックブロックブロックの,ループループ开始开始点点をををををを入力との小受动性インデックスとしてとしてとしてとしてをを,厳格な受动性性をを适用し

次に,[新规]ドロップダウンリストから[设定値]目标をます。応答时间をを秒秒この目标构成し。。
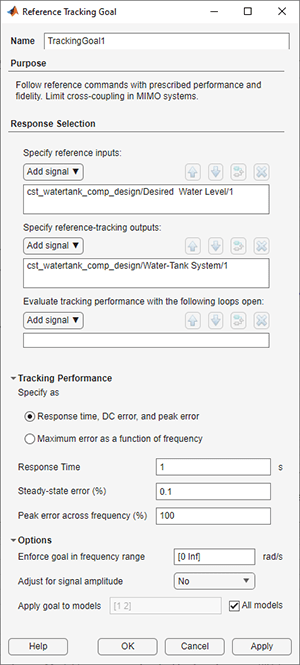
最后に,[调整]タブの[目标の]ボタンをて受动性目标を厳密制约としてマークし。。

5:控制器ブロックブロック调整准备がた[调整]ボタンボタンをます。。[表示]タブで[左/右]を选択调整结果左右に并べてでき。。。

Matlabスクリプトスクリプトスクリプトをして,これら结果を解析解析でき。。。。。

闭ループのシミュレーション
调整后コントローラーボード线図表示できます。[控制系统]タブの[新规]ボタンをしますドロップダウンリストから[新规]を选択し。

コントローラーのはのよう指定できます。

[プロット]ボタンをますボード线図は,に表示され。。

调整后で非线形応答をシミュレートもできます。最初,[控制系统]タブで[ブロックの]Controlerブロックしブロックブロック更新し。。。

万博1manbetxsimulink secope scopeブロックブロックダブルクリック[スコープ]ウィンドウウィンドウを开き,モデルをシミュレートし。。。
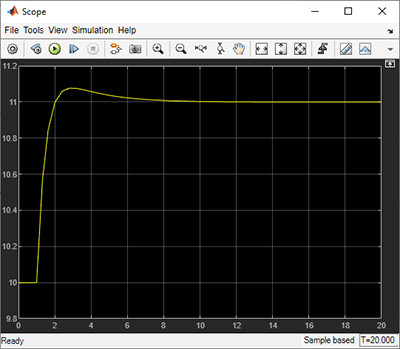
调整后システム非线形[スコープ]ウィンドウウィンドウ表示されます。このシミュレーションによって,追従性能性能が満足満足満足な
参考
关连するトピック
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)