機体の平衡化と線形化
この例では,万博1manbetx仿真软件®控制设计™ソフトウェアを使用して機体を平衡化および線形化する方法を示します。
目標は,昇降舵の偏差と結果的に平衡化された本体比を検出することです。これにより,設定速度で機体が飛行する際に指定の入射角が生成されます。
平衡化条件を見つけると,その平衡化条件状態の周辺にあるダイナミクスについて線形モデルを計算できます。
固定のパラメタ:
入射角 (
θ)機体姿勢 (
U)位置
平衡化された定常状態のパラメタ:
昇降舵の偏差(
w)本体比 (
问)
操作点の計算
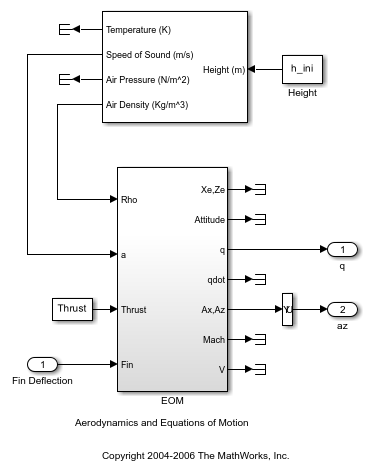
モデルを開きます。
mdl =“scdairframe”;open_system (mdl)
モデルの初期条件を使用してモデルの操作点の仕様オブジェクトを作成します。
Opspec = operspec(mdl)
opspec =型号scdairframe的操作点规范。(t=0时刻的时变分量)---------- < 强x > < /强> < >强知道< /强> < >强稳态< /强> < >强Min < /强> <强> Max < /强> < >强dxMin < /强> < >强dxMax < /强> <强> ___ < /强> <强> ___ < /强> <强劲 >___________ <强> ___ < /强> <强> ___ < /强> <强> ___ < /强> <强> ___ < / >强(1)scdairframe /加工/运动方程(轴)/位置0假真负无穷到正无穷负无穷到正无穷-3048假真负无穷到正无穷正(2)scdairframe /加工/方程运动(体轴)/Theta 0 false true -Inf Inf -Inf Inf (3.) scdairframe/EOM/运动方程(体轴)/U,w 984 false true -Inf Inf -Inf Inf 0 false true -Inf Inf -Inf Inf (4.) scdairframe/EOM/运动方程(体轴)/q 0 false true -Inf Inf -Inf Inf---------- u Max _ _____ ___ (1.) scdairframe/Fin Deflection 0 (1.) scdairframe/Fin Deflection 0 (1.) scdairframe/Fin Deflection 20 Min已知 Min _ Max _ _____ (1.) scdairframe/q 0 false -Inf Inf (2.) scdairframe/az 0 false -Inf Inf
モデルのどの状態が以下に該当するかを指定します。
操作点で既知
操作点で定常状態
位置の状態は既知であり,定常状態ではないことを指定します。状態値はopspec.States(1)方式で指定し,モデルの初期条件から既定値を使用します。
opspec.States(1)。已知= [1;1];opspec.States(1)。稳态= [0;0];
2番目の状態は入射角θに対応します。これは既知ですが,定常状態ではないことを指定します。位置の状態と同様に、モデルの初期条件から既定の状態値を使用します。
opspec.States(2)。已知= 1;opspec.States(2)。稳态= 0;
3番目の状態仕様には,機体軸の角速度Uとwが含まれます。どらの状態も操作点で既知であり,wは定常状態であることを指定します。
opspec.States(3)。已知= [1 1];opspec.States(3)。稳态状态= [0 1];
これらの仕様を満たす操作点を求めます。
Op = findop(mdl,opspec);
操作点搜索报告:--------------------------------- opreport = Model scdairframe操作点搜索报告。(时变组分在t=0时的评估值)成功满足作业点规格。状态:---------- < 强> Min < /强> < >强x < /强> <强> Max < /强> < >强dxMin < /强> < >强dx < /强> < >强dxMax < /强> <强> ___ < /强> <强劲 >__________ <强> ___ < /强> <强> ___ < /强> <强劲 >___________ <强> ___ < / >强(1)scdairframe /加工/运动方程(身体轴)/位置0 0 0负984正-3048 -3048 -3048 0负无穷到正无穷(2)scdairframe /加工/运动方程(轴)/θ0 0 0负-0.0097235正(3)。scdairframe/EOM/运动方程(身体轴)/U,w 984 984 984 -Inf 22.69 Inf 00 00 -1.4367e-11 0 (4.) scdairframe/EOM/运动方程(身体轴)/q -Inf -0.0097235 Inf 0 1.1477e-16 0输入:---------- Min U Max ____ _________ ___ (1.) scdairframe/Fin Deflection -Inf 0.0014161 Inf输出:---------- < 强> Min < /强> <强> y < /强> <强> Max < /强> <强> ___ < /强> <强劲 >__________ <强> ___ < / >强(1)scdairframe / q负-0.0097235正无穷(2)scdairframe / az负-0.24207正无穷
モデルの線形化
計算された操作点でモデルを線形化するには,最初に線形化の入力ポ电子书阅读器ントと出力ポ电子书阅读器ントを指定します。
Io (1) = linio(“scdairframe /鳍偏转”, 1“输入”);Io (2) = linio(“scdairframe /加工”3,“输出”);Io (3) = linio(“scdairframe /选择器”, 1“输出”);
操作点でモデルを線形化します。
系统=线性化(mdl,op,io);
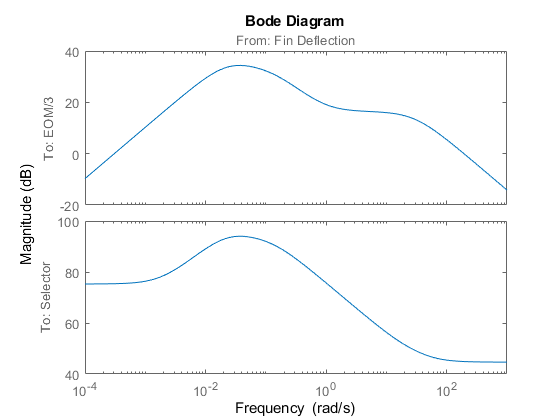
線形モデルのボド振幅応答をプロットします。
bodemag (sys) bdclose (“scdairframe”)
参考
関連するトピック
您也可以从以下列表中选择网站: