调整机身自动驾驶增益
本例展示了如何应用Simulink®Design Optimiz万博1manbetxation™来优化机身的自动驾驶增益以控制其翅片偏转。该模型使用来自Aerospace Blockset™的块。
自动驾驶仪控制器由内俯仰环和外垂直加速度环组成。两个控制器都是积分控制器。两个控制器的增益都经过调谐,以满足2秒上升时间步长响应特性。
打开nlairframe_demo使用下面的命令建模并运行模拟。仿真得到了未优化的机身垂直加速度和初始优化数据。
open_system (“nlairframe_demo”)
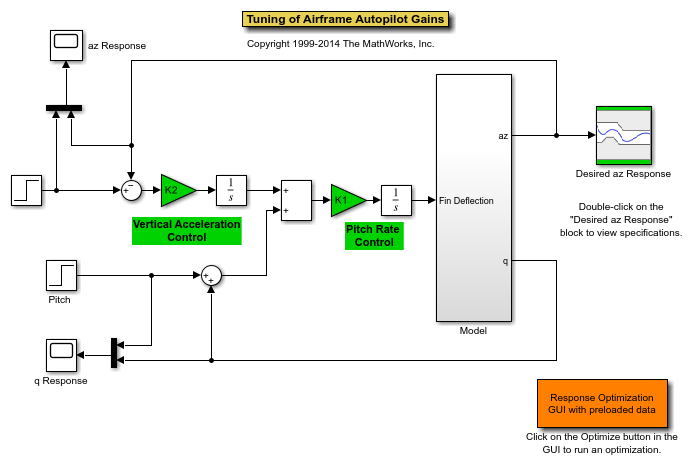
双击阿兹反应范围块,查看未优化的垂直加速度的机身。
双击问响应范围块查看未优化的机身旋转速率q。
双击模型块查看子系统的详细信息。它包括一个大气模型和空气动力学和运动方程模型。
双击期望可用分区响应块查看机身垂直加速度的约束。这些约束被用来同时调谐两个积分控制器的增益。上限约束的第一部分表示超调。注意,这是一个软约束,可以被违反。
您可以启动响应优化器使用应用程序菜单中的万博1manbetxsdotool命令在MATLAB®。中启动预先配置的优化任务响应优化器首先打开模型,然后双击模型底部的橙色块。从响应优化器,按地块模型响应按钮来模拟模型,并显示初始设计满足设计要求的程度。

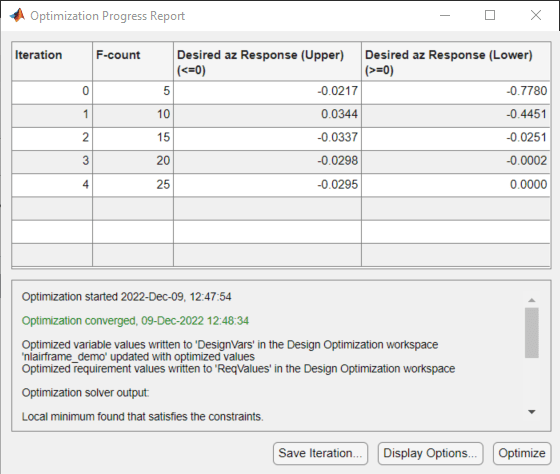
我们通过按按钮开始优化优化按钮。响应优化器.图被更新以表明设计需求现在得到满足。
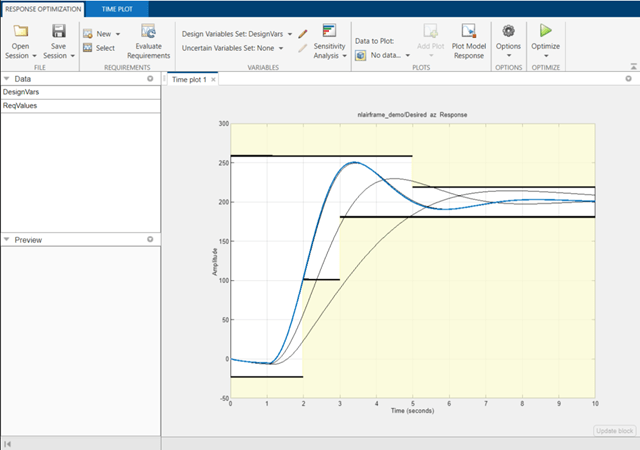
较暗的曲线表示机身的最终优化响应。
关闭模型。bdclose (“nlairframe_demo”)
您也可以从以下列表中选择一个网站: