このペ,ジの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
ステ,トとしての万博1manbetxサブシステム
万博1manbetx®サブシステムを状态流®ステート内で使用することにより,ハイブリッド動的システム,または周期的ダイナミクスと連続時間ダイナミクスの間で切り替わるシステムをモデル化できます。Stateflowチャト内で Simulink ベースのステートを使用して、周期的または連続的な動的システムを、遷移を使用したスイッチ ロジックと組み合わせてモデル化できます。Simulink ベースの各ステート内のチャートから入出力にアクセスできます。Simulink ベースのステートは、MATLAB®内のスタンドアロンのstatflowチャ,トではサポ,トされません。
万博1manbetx仿真软件ベースのステートを切り替える際に仿真软件ブロックを初期化するには,Stateflowのテキスト表記か,仿真软件の国家读者ブロックと国家作家ブロックを使用します。
リンクされた仿万博1manbetx真软件ベースのステートを作成するには,ライブラリを使用してアクションサブシステムを保存します。アクションサブシステムをライブラリモデルからStateflowチャートに保存すると,リンクされた仿真软件ベ万博1manbetxースのステートとして表示されます。ライブラリブロックを更新すると,そのブロックを含むすべてのStateflowチャートに変更内容が反映されます。
万博1manbetx仿真软件ベースのステートを使用すると,ハイブリッドシステムをモデル化するためにStateflowで複雑なテキスト構文を使用する必要がなくなります。
万博1manbetxベ,スのステ,トを使用する場合
次の場合にS万博1manbetximulinkベ,スのステ,トを使用します。
連続ダ▪▪ナミクスまたは周期的ダ▪▪ナミクスを含むハ▪▪ブリッド動的システムをモデル化する場合。
さまざまな動作モード間で,システムダイナミクスの構造が大きく変わる場合(PIDコントローラーのモデル化など)。
ロジックを断続的に呼び出すシステムでは,万博1manbetxSimulink関数を使用します。
万博1manbetx仿真软件アルゴリズムの構造にはほとんど変化がなくても,特定のゲインやパラメーターがさまざまなモデル間で切り替わる場合は,Stateflow外部の仿真软件ロジックを使用します。このようなアルゴリズムの例として,ゲ。万博1manbetxSimulinkでのゲ转换器ンスケジュ转换器ル制御システムのモデル化(万博1manbetxSimulink控制设计)を参照してください。
万博1manbetxSimulinkベ,スのステ,トを使用した棒高跳び選手のモデル化
次のStateflowチャートは,仿真万博1manbetx软件ベースのステートを使用して,棒高跳びの各段階の動作を順に実行する人物をモデル化します。
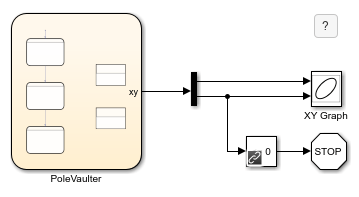
最初の段階は棒高跳び選手の助走で,これはS万博1manbetximulinkベ,スのステ,トRun_upでモデル化されています。2番目の段階では,選手は地面にポ,ルを突いて踏み切ります。これはS万博1manbetximulinkベ,スのステ,トTake_offでモデル化されています。最後の段階では,選手がバ,を跳び越え,ポ,ルを手放します。これはS万博1manbetximulinkベ,スのステ,ト飞でモデル化されています。
ステトRun_upおよび飞は,直交座標を使用するとより簡単にモデル化できます。ステトTake_offは,極座標を使用するとより簡単にモデル化できます。座標系を別の座標系に切り替えるには,万博1manbetxSimulink関数のInitTakeOffおよびInitFlyを使用します。
棒高跳び選手の助走のモデル化
チャトPoleVaulterのデフォルトステ,トはRun_upです。このステ,トは,跳躍に向けて地面を助走する棒高跳び選手をモデル化します。棒高跳び選手は,![]() 軸上の-10から開始し,0へ向かって走ります。棒高跳び選手が地面を移動するにつれて,xy平面上の棒高跳び選手の位置は常に変化しますが,走っている状態は維持されます。このモデルでは,積分器ブロックである
軸上の-10から開始し,0へ向かって走ります。棒高跳び選手が地面を移動するにつれて,xy平面上の棒高跳び選手の位置は常に変化しますが,走っている状態は維持されます。このモデルでは,積分器ブロックである位置と速度は,万博1manbetxSimulink関数InitTakeOff内の状态阅读器ブロックの状態オ,ナ,ブロックです。このサブシステムは棒高跳び選手の直交座標を出力します。

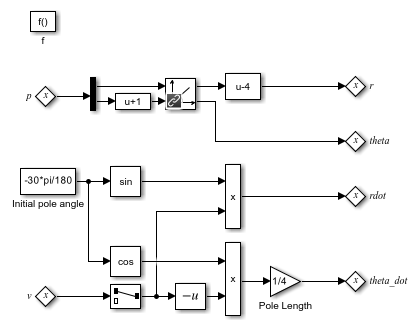
直交座標から極座標への変換
![]() 軸上の棒高跳び選手の位置
軸上の棒高跳び選手の位置Run_up.p (1)が-4より大きくなると,Run_upからTake_offへの遷移が発生します。この遷移中にInitTakeOffが初期化され,国家读者ブロックがそのオーナーブロックに接続されて,この関数が実行されます。この関数により,位置と速度の直交座標がr、θ、rdot,およびtheta_dotという極座標に変換されます。これらの座標は,ステ,トTake_offのオ,ナ,ブロックに接続された状态Writerブロックとして出力されます。万博1manbetxSimulink関数InitTakeOffには次のロジックが含まれます。

棒高跳び選手の踏み切りのモデル化
![]() 軸上の棒高跳び選手の位置
軸上の棒高跳び選手の位置Run_up.p (1)が-4より大きくなると,Si万博1manbetxmulinkベ,スのステ,トTake_offがアクティブステ,トになります。このステ,トは,跳躍の踏み切りの段階における棒高跳び選手をモデル化します。このサブシステムは棒高跳び選手の直交座標を出力します。
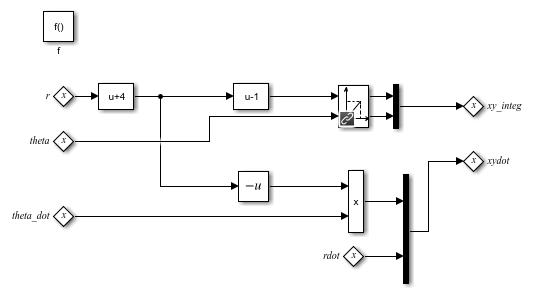
極座標から直交座標への変換
棒高跳び選手の角度θが![]() 未満になると,
未満になると,Take_offから飞への遷移が発生します。この遷移中にInitFlyが初期化され,国家读者ブロックがそのオーナーブロックに接続されて,この関数が実行されます。この関数により,r、θ、rdot,およびtheta_dotの極座標がxy_integおよびxydotという直交座標に変換されます。これらの座標は,ステ,ト飞のオ,ナ,ブロックに接続された状态Writerブロックとして出力されます。万博1manbetxSimulink関数InitFlyには次のロジックが含まれます。

棒高跳び選手の自由落下のモデル化
棒高跳び選手の角度θが![]() 未満になると,万博1manbetxSimulinkベ,スのステ,ト
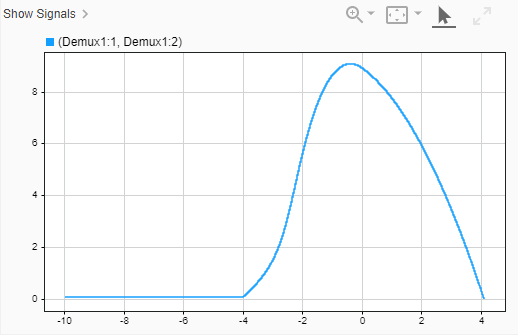
未満になると,万博1manbetxSimulinkベ,スのステ,ト飞がアクティブステ,トになります。このステ,トでは,棒高跳び選手が跳躍してバ,を飛び越えて,地面に落下するところをモデル化します。棒高跳び選手が落下するにつれて,xy平面上の選手の位置は常に変化しますが,落下している状態は維持されます。このモデルでは,積分器ブロックであるxydotとxy_integは,万博1manbetxSimulink関数InitFly内の State Writer ブロックの状態オーナー ブロックです。このサブシステムは棒高跳び選手の直交座標を出力します。
このシミュレションの結果が记录ブロックに表示されます。
制限
万博1manbetxSimulinkベ,スのステ,トは,以下と併用できません。
摩尔チャ,ト
離散▪▪ベントチャ▪▪ト
高密度脂蛋白编码器
PLC编码器
万博1manbetxSimulink代码检查器
ス,パ,ステップ遷移
万博1manbetxSimulinkベ,スのステ,トではデバッグはサポ,トされていません。
関連するトピック
您也可以从以下列表中选择一个网站: