振子の周期的揺れの動きのシミュレ,ションgydF4y2Ba
この例では符号数学工具箱™を使用して単純な振子の動きをモデル化する方法を示します。振子の運動方程式を導出し,その方程式を小角について解析的に解き,任意の角度について数値的に解きます。gydF4y2Ba
手順1:運動方程式の導出gydF4y2Ba
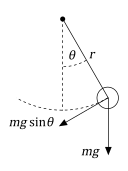
振子は,微分方程式に従う単純な機械的システムです。振子は,初期状態では垂直位置で停止しています。振子がある角度gydF4y2Ba だけ動かされ放されると,重力によりその静止位置へ引っ張られます。その運動量により行き過ぎて角度gydF4y2Ba に達し(摩擦力がない場合),これを繰り返します。重力による振子の動きに伴う復元力はgydF4y2Ba です。したがって,ニュ,トンの第2法則に従って,質量と加速度の積はgydF4y2Ba に等しくなければなりません。gydF4y2Ba
信谊gydF4y2Ba米gydF4y2Ba一个gydF4y2BaggydF4y2Baθ(t)gydF4y2BaEqn = m*a == -m*g*sin(theta)gydF4y2Ba
eqn (t) =gydF4y2Ba
長さがgydF4y2Ba の振子では,振子の重りの加速度は角加速度にgydF4y2Ba を乗じたものです。gydF4y2Ba
.gydF4y2Ba
潜艇gydF4y2BaをgydF4y2Ba
の代わりに使用します。gydF4y2Ba
信谊gydF4y2BargydF4y2BaEqn = subs(Eqn,a,r*diff(theta,2))gydF4y2Ba
eqn (t) =gydF4y2Ba
隔离gydF4y2Baを使用してgydF4y2BaeqngydF4y2Ba内の角加速度を分離します。gydF4y2Ba
Eqn = isolate(Eqn,diff(theta,2))gydF4y2Ba
eqn =gydF4y2Ba
定数gydF4y2Ba およびgydF4y2Ba を"固有振動数"gydF4y2Baとしても知られる単一のパラメ,タ,にまとめます。gydF4y2Ba
。gydF4y2Ba
信谊gydF4y2Baomega_0gydF4y2BaEqn = s(Eqn,g/r, 0^2)gydF4y2Ba
eqn =gydF4y2Ba
手順2:運動方程式の線形化gydF4y2Ba
この運動方程式は非線形であるため解析的な求解が困難です。角度が小さいと仮定して,gydF4y2Ba のテ▪▪ラ▪▪展開を使用して方程式を線形化します。gydF4y2Ba
信谊gydF4y2BaxgydF4y2Ba近似= taylor(sin(x) x,gydF4y2Ba“秩序”gydF4y2Ba2);近似= subs(近似,x, (t))gydF4y2Ba
约=gydF4y2Ba
運動方程式は線形方程式になります。gydF4y2Ba
eqnLinear = subs(eqn,sin((t)),近似)gydF4y2Ba
eqnLinear =gydF4y2Ba
手順3:運動方程式の解析的な求解gydF4y2Ba
方程式gydF4y2BaeqnLineargydF4y2BaをgydF4y2BadsolvegydF4y2Baを使用して解きます。初期条件を2番目の引数として指定します。gydF4y2Ba假设gydF4y2Baを使用してgydF4y2Ba
が実数であると仮定して,解を単純化します。gydF4y2Ba
信谊gydF4y2Batheta_0gydF4y2Batheta_t0gydF4y2BaTheta_t = diff(theta);Cond = [theta(0) == theta_0, theta_t(0) == theta_t0];假设(omega_0gydF4y2Ba“真实”的gydF4y2Ba) thetaSol(t) = dsolve(eqnLinear,cond)gydF4y2Ba
thetaSol (t) =gydF4y2Ba
手順 4:gydF4y2Ba の物理的意味gydF4y2Ba
項gydF4y2Ba は,“位相”gydF4y2Baと呼ばれます。余弦関数と正弦関数は,gydF4y2Ba ごとに繰り返します。gydF4y2Ba をgydF4y2Ba だけ変化させるのに必要な時間は時間周期と呼ばれます。gydF4y2Ba
.gydF4y2Ba
時間周期gydF4y2Ba は振子の長さの平方根に比例し,質量には依存しません。線形運動方程式では,時間周期は初期条件に依存しません。gydF4y2Ba
手順5:振子運動のプロットgydF4y2Ba
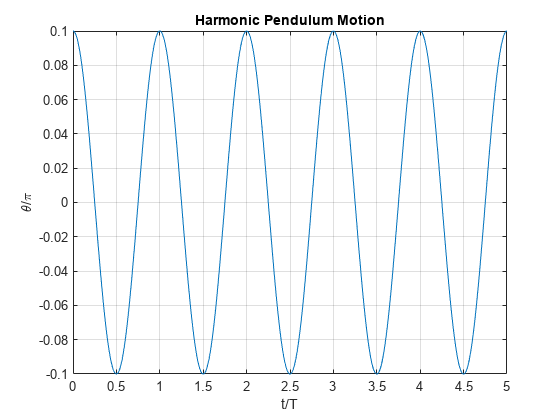
小角近似における振子の運動をプロットします。gydF4y2Ba
物理パラメ,タ,を定義します。gydF4y2Ba
重力加速度gydF4y2Ba
振子の長さgydF4y2Ba
gValue = 9.81;rValue = 1;omega_0Value = sqrt(gValue/rValue);T = 2*pi/omega_0Value;gydF4y2Ba
初期条件を設定します。gydF4y2Ba
theta_0Value = 0.1*pi;gydF4y2Ba%解只适用于小角度。gydF4y2Batheta_t0Value = 0;gydF4y2Ba最初处于静止状态。gydF4y2Ba
物理パラメ,タ,および初期条件を一般解に代入します。gydF4y2Ba
Vars = [omega_0 theta_0 theta_t0];values = [omega_0Value theta_0Value theta_t0Value];thetaSolPlot = subs(thetaSol,vars,values);gydF4y2Ba
調和振子運動をプロットします。gydF4y2Ba
fplot(thetaSolPlot(t* t)/pi, [0 5]);网格gydF4y2Ba在gydF4y2Ba;标题(gydF4y2Ba“谐摆运动”gydF4y2Ba);包含(gydF4y2Ba“电汇”gydF4y2Ba);ylabel (gydF4y2Ba“θ/ \ \π”gydF4y2Ba);gydF4y2Ba
の解を求めた後,振子の運動を可視化します。gydF4y2Ba
x_pos = sin(thetaSolPlot);y_pos = -cos(thetaSolPlot);fanimator (@fplot x_pos y_pos,gydF4y2Ba“柯”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“k”gydF4y2Ba,gydF4y2Ba“AnimationRange”gydF4y2Ba[0 5 * T]);持有gydF4y2Ba在gydF4y2Ba;fananimator (@(t) plot([0 x_pos(t)],[0 y_pos(t)],gydF4y2Ba“k -”gydF4y2Ba),gydF4y2Ba“AnimationRange”gydF4y2Ba[0 5 * T]);fanimator (@ (t)文本(-0.3,0.3,gydF4y2Ba计时器:“gydF4y2Ba+ num2str (t, 2) +gydF4y2Ba“s”gydF4y2Ba),gydF4y2Ba“AnimationRange”gydF4y2Ba[0 5 * T]);gydF4y2Ba
コマンドgydF4y2Ba那里gydF4y2Baを入力して振子運動のアニメ,ションを再生します。gydF4y2Ba
手順6:定エネルギ,軌道を使用した非線形振子運動の判別gydF4y2Ba
振子の非線形運動を理解するには,全エネルギ,の方程式を使用して振子の軌道を可視化します。全エネルギ,は保存されます。gydF4y2Ba
三角恒等式gydF4y2Ba および関係gydF4y2Ba を使用して,スケ,リングされたエネルギ,を書き換えます。gydF4y2Ba
エネルギ,は保存されるため,振子の運動は位相空間内の定エネルギ,軌道によって記述できます。位相空間は座標gydF4y2Ba
およびgydF4y2Ba
をも抽象空間です。これらの軌道をgydF4y2BafcontourgydF4y2Baを使用して可視化します。gydF4y2Ba
信谊gydF4y2BaθgydF4y2Batheta_tgydF4y2Baomega_0gydF4y2BaE(θ,theta_t omega_0) = (1/2) * (theta_t ^ 2 + (2 * omega_0 * sin(θ/ 2))^ 2);Eplot(, theta_t) = subs(E,omega_0,omega_0Value);图;fc = fcontour(Eplot(pi*theta, 2*omega_0Value*theta_t), 2*[-1 1 -1 1],gydF4y2Ba...gydF4y2Ba“线宽”gydF4y2Ba2,gydF4y2Ba“LevelList”gydF4y2Ba0:5:50,gydF4y2Ba“MeshDensity”gydF4y2Ba1 + 2 ^ 8);网格gydF4y2Ba在gydF4y2Ba;标题(gydF4y2Ba相空间中的恒能量等高线(\theta vs \theta_t)gydF4y2Ba);包含(gydF4y2Ba“θ/ \ \π”gydF4y2Ba);ylabel (gydF4y2Ba“\ theta_t / 2 \ omega_0”gydF4y2Ba);gydF4y2Ba
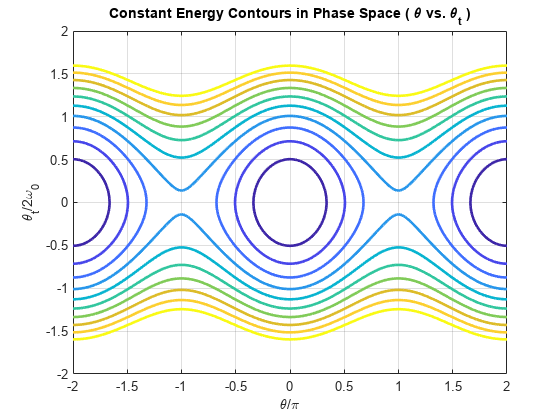
一定エネルギ,の等高線はgydF4y2Ba 軸およびgydF4y2Ba 軸に対して対称であり,gydF4y2Ba 軸に沿って周期的です。2つの動作領域を図に示します。
等高線図の下側のエネルギ,は自身に近くなります。振子は2の最大角と最大速度の間で揺れます。振子の運動エネルギーは重力エネルギーに打ち勝つには十分ではなく,振子を完全に回転させることはできません。gydF4y2Ba

等高線図の上側のエネルギ,は自身に近づきません。振子は常に1の角度方向で運動します。振子の運動エネルギーは重力エネルギーに打ち勝つのに十分であり,振子を完全に回転させることができます。gydF4y2Ba

手順7:非線形運動方程式の求解gydF4y2Ba
非線形運動方程式は,2階微分方程式です。gydF4y2Ba数值gydF4y2Baソルバ,を使用して,これらの方程式を数値的に解きます。gydF4y2Ba数值gydF4y2Baは1次の系だけを受け入れるため,系を1次の系に簡約します。次に,gydF4y2Ba数值gydF4y2Baへの入力となる関数ハンドルを生成します。gydF4y2Ba
2階odeを1階ode系として書き換えます。gydF4y2Ba
信谊gydF4y2Baθ(t)gydF4y2Batheta_t (t)gydF4y2Baomega_0gydF4y2Ba= [diff(theta) == theta_t;Diff (theta_t) == -omega_0^2*sin(theta)]gydF4y2Ba
方程式(t) =gydF4y2Ba
eqs = subs(eqs,omega_0,omega_0Value);Vars = [theta, theta_t];gydF4y2Ba
系の質量行列gydF4y2Ba米gydF4y2Baおよび方程式gydF4y2BaFgydF4y2Baの右辺を含むベクトルを求めます。gydF4y2Ba
[M,F] = massMatrixForm(eqs,vars)gydF4y2Ba
M =gydF4y2Ba
F =gydF4y2Ba
米gydF4y2BaおよびgydF4y2BaFgydF4y2Baは次の形で表されます。gydF4y2Ba
後の計算を単純化するために,系を次の形に書き換えます。gydF4y2Ba 。gydF4y2Ba
f = M\ fgydF4y2Ba
f =gydF4y2Ba
odeFunctiongydF4y2Baを使用して,gydF4y2BafgydF4y2Baをmatlab関数ハンドルに変換します。結果の関数ハンドルはmatlab odeソルバgydF4y2Ba数值gydF4y2Baの入力になります。gydF4y2Ba
f = odeFunction(f, vars)gydF4y2Ba
f =gydF4y2BaFunction_handle with value:gydF4y2Ba@ (t, in2) [in2(2:);罪(in2(1:))。* 2./1.0 (-9.81 e + e + 2))gydF4y2Ba
手順8:閉じたエネルギ,等高線における運動方程式の求解gydF4y2Ba
数值gydF4y2Baを使用して,閉じたエネルギ,等高線のodeを解きます。gydF4y2Ba
エネルギ,等高線図から,閉じた等高線は条件gydF4y2Ba
、gydF4y2Ba
を満たします。gydF4y2Ba
およびgydF4y2Ba
の初期条件を変数gydF4y2Bax0gydF4y2Baに保存します。gydF4y2Ba
X0 = [0;1.99 * omega_0Value];gydF4y2Ba
解を求めるため,0秒から10秒までの時間間隔を指定します。この間隔で,振子は2周期分動くことができます。gydF4y2Ba
tInit = 0;tFinal = 10;gydF4y2Ba
Odeを解きます。gydF4y2Ba
sols = ode45(f,[tInit tFinal],x0)gydF4y2Ba
溶胶=gydF4y2Ba带字段的结构:gydF4y2Ba求解器:'ode45' extdata: [1x1 struct] x: [0 3.2241e-05 1.9344e-04 9.9946e-04 0.0050 0.0252 0.1259…[y: [2x45 double] stats: [1x1 struct] idata: [1x1 struct]gydF4y2Ba
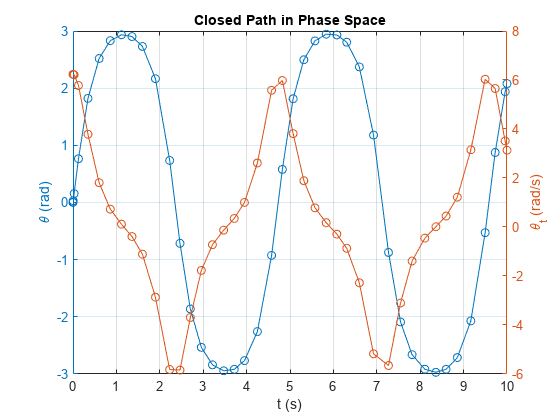
: sols.y (1)gydF4y2Baは角変位gydF4y2Ba
を表し,gydF4y2Ba: sols.y (2)gydF4y2Baは角速度gydF4y2Ba
を表します。gydF4y2Ba
閉じた軌道の解をプロットします。gydF4y2Ba
图;yyaxisgydF4y2Ba左gydF4y2Ba;情节(溶胶。x,: sols.y (1),gydF4y2Ba“o”gydF4y2Ba);ylabel (gydF4y2Ba“\θ(rad)”gydF4y2Ba);yyaxisgydF4y2Ba正确的gydF4y2Ba;情节(溶胶。x,: sols.y (2),gydF4y2Ba“o”gydF4y2Ba);ylabel (gydF4y2Ba' \ theta_t (rad / s) 'gydF4y2Ba);网格gydF4y2Ba在gydF4y2Ba;标题(gydF4y2Ba“相空间中的闭合路径”gydF4y2Ba);包含(gydF4y2Ba“t (s)”gydF4y2Ba);gydF4y2Ba
振子の運動を可視化します。gydF4y2Ba
X_pos = @(t) sin(deval(sols,t,1));Y_pos = @(t) -cos(deval(sols,t,1));图;fanimator (@ (t)情节(x_pos (t) y_pos (t)gydF4y2Ba“柯”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“k”gydF4y2Ba));持有gydF4y2Ba在gydF4y2Ba;fananimator (@(t) plot([0 x_pos(t)],[0 y_pos(t)],gydF4y2Ba“k -”gydF4y2Ba));fanimator (@ (t)文本(-0.3,1.5,gydF4y2Ba计时器:“gydF4y2Ba+ num2str (t, 2) +gydF4y2Ba“s”gydF4y2Ba));gydF4y2Ba
コマンドgydF4y2Ba那里gydF4y2Baを入力して振子運動のアニメ,ションを再生します。gydF4y2Ba
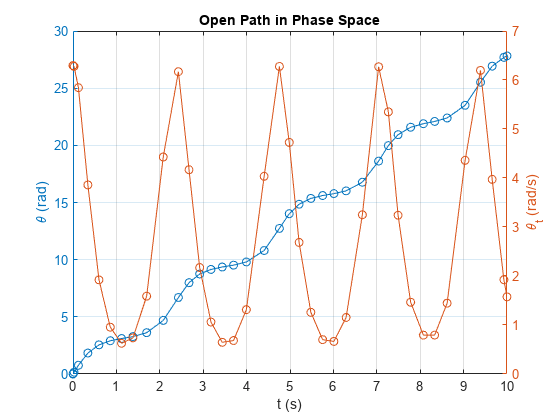
手順9:開いたエネルギ,等高線の解gydF4y2Ba
数值gydF4y2Baを使用して,開いたエネルギ,等高線のodeを解きます。エネルギ,等高線図から,開いた等高線は条件gydF4y2Ba
、gydF4y2Ba
を満たします。gydF4y2Ba
X0 = [0;2.01 * omega_0Value];sols = ode45(f, [tInit, tFinal], x0);gydF4y2Ba
開いたエネルギ,等高線の解をプロットします。gydF4y2Ba
图;yyaxisgydF4y2Ba左gydF4y2Ba;情节(溶胶。x,: sols.y (1),gydF4y2Ba“o”gydF4y2Ba);ylabel (gydF4y2Ba“\θ(rad)”gydF4y2Ba);yyaxisgydF4y2Ba正确的gydF4y2Ba;情节(溶胶。x,: sols.y (2),gydF4y2Ba“o”gydF4y2Ba);ylabel (gydF4y2Ba' \ theta_t (rad / s) 'gydF4y2Ba);网格gydF4y2Ba在gydF4y2Ba;标题(gydF4y2Ba“相空间中的开放路径”gydF4y2Ba);包含(gydF4y2Ba“t (s)”gydF4y2Ba);gydF4y2Ba
振子の運動を可視化します。gydF4y2Ba
X_pos = @(t) sin(deval(sols,t,1));Y_pos = @(t) -cos(deval(sols,t,1));图;fanimator (@ (t)情节(x_pos (t) y_pos (t)gydF4y2Ba“柯”gydF4y2Ba,gydF4y2Ba“MarkerFaceColor”gydF4y2Ba,gydF4y2Ba“k”gydF4y2Ba));持有gydF4y2Ba在gydF4y2Ba;fananimator (@(t) plot([0 x_pos(t)],[0 y_pos(t)],gydF4y2Ba“k -”gydF4y2Ba));fanimator (@ (t)文本(-0.3,1.5,gydF4y2Ba计时器:“gydF4y2Ba+ num2str (t, 2) +gydF4y2Ba“s”gydF4y2Ba));gydF4y2Ba
コマンドgydF4y2Ba那里gydF4y2Baを入力して振子運動のアニメ,ションを再生します。gydF4y2Ba

您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba