电机控制块集
モーターモーター制御アルゴリズムのの设计と装
电机控制BlockSet™には,ブラシレスブラシレスモーターにベクトルや他他アルゴリズムを制作万博1manbetx®ブロックが用力されていいますます。ブロックブロックは,パークパークとクラーク変,センサーセンサーのバー,弱め弱め,空间ベクトル変调,田间控制自动箱などがあります。制御アルゴリズムは,ブロックセットに含まれるモーターインバーターのモデルを使使て,闭ループのシミュレーションで検证できます。
上で定义済みのを実行,固定子抵抗,d轴q轴インダクタンス,逆起电力,惯性,および摩擦を特定。これらののモーターパラメーター値を闭ループのシミュレーションに组み込むこと,コントローラーコントローラー设计を解析でき
参照例では,デスクトップシミュレーションで制御アルゴリズムを検证し,运用环境への実装に必要な実行速度に対応したコンパクトなÇコードを生成する方法をご绍介します。また,この参照例を使用して,ブロックセット対応のモーター制御ハードウェアキット向けにアルゴリズムを実装することもできます。
详细を见る:

シミュレーションとコード生成
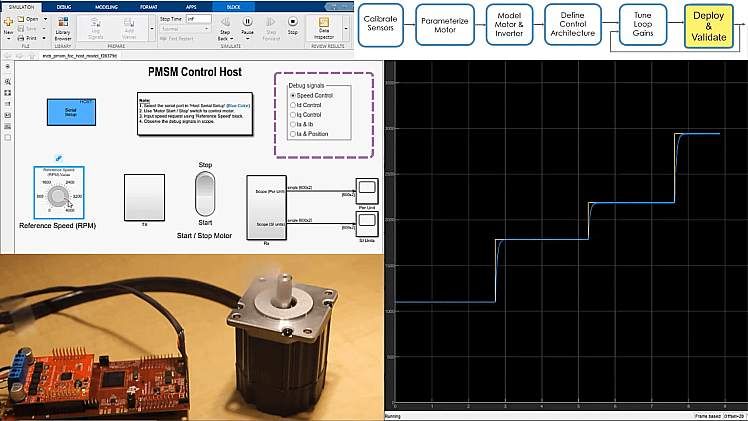
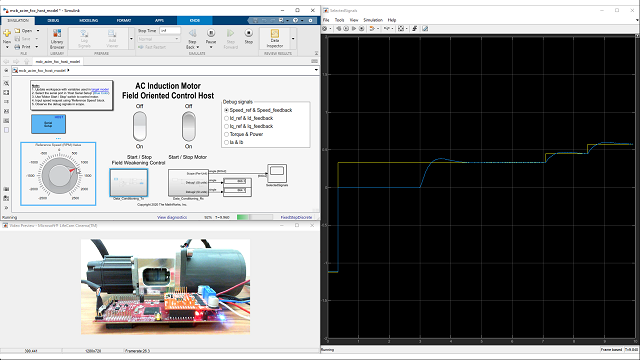
表面および埋込永久磁石同期モーター(PMSM)や诱导モーター,ブラシレスDCモーター(BLDC)のベクトル制御アルゴリズムを设计および実装するための出発点として,完全组み立て済みの参照例を使用します。これらのモデル例を使用して,闭ループシステムのシミュレーションでアルゴリズム设计をテストおよび検证した后,同じモデルを再利用して,组み込みコードを生成および実装します。

モーター制御キット
参照例を使用して,コンパクトで处理速度の速いÇコードをすばやく生成し,サポートされているいくつかのモーター制御ハードウェアキット向けにモーター制御アルゴリズムを実装します。アプリケーションをSim万博1manbetxulink的モデルから直接ターゲットマイクロプロセッサーに自动的に构筑および実装して,モーターハードウェアでアルゴリズムをテストします。ホストマシンからこれらのターゲットアプリケーションと通信して制御します。

制御アルゴリズムの设计
万博1manbetxSimulink中で,永久磁石同期モーター(PMSM)や诱导モーター用にベクトル制御アルゴリズムを作成するには,公园,克拉克,PIコントローラー,空间ベクトル変调,最大トルク/电流制御(MTPA),弱め界磁ブロック,および诱导モーターの滑り速度推定器ブロックを使用します0.6段阶整流ブロックを使用して,ブラシレスDC(BLDC)モーターを制御します。
コード生成
组み込み组み込みに装配するためのコンパクトでで定理速度の速い浮浮点点点または小数点コード生成しし(嵌入式编码器をを用)。リアルタイム実行のによって,现处于のループパフォーマンスを评価し。

ギャラリーを见る(2画像)
ラピッドコントロールプロトタイピング
万博1manbetxSimulink Real-timeおよびspeedgoatの电视モーター制御キット使てて,リアルタイムますますますますいい,ては,アナログてデジタルi / oをてspeedgo atののタイムハードウェアて速Goilで开発されたブラシレスDCモーター制御アルゴリズムを実行およびテストするための完全なソフトウェア/ハードウェアパッケージで构成されています。

Speedgoatの电视モーター制御キット。
センサーデコーダー
参照例を使用して,ホールセンサーと直交エンコーダーのオフセットをキャリブレートします。次に,センサーデコーダーブロックを使用して,ホールセンサー,直交エンコーダー,リゾルバーからの信号を处理し,回転子の位置と速度を计算します。

电机控制模块库のセンサーデコーダーライブラリ。
オブザーバー
滑模观测ブロックと磁通观测ブロックを使用して,センサーなしのベクトル制御を実装します。これらのブロックを使用して,测定された电圧と电流から永久磁石同期モーター(PMSM)や诱导モーターの回転子の电気的位置と机械的速度を计算します。磁束と机械式トルクを推定します。组み込みコードを生成する前に,オブザーバーパラメータを调整し,シミュレーションでオブザーバーの动作を确认します。

滑模观测ブロックを使用した位置と速度の推定。
最初のコントローラーの调整
モーターとインバーターのパラメーターに基づいて速度ループと电流ループの初期PIコントローラーのゲインを自动的に计算します。提供されているスクリプトは,根轨迹,ボード线図,および电流ループのステップ応答を计算してプロットすることにより,时间领域と周波数领域で电流ループのダイナミクスを分析するのに役立ちます(控制系统工具箱を使用)。

计算済みのコントローラーゲインをモーターハードウェアでテスト。
面向实地的控制自动箱
场定向控制自动调节器ブロックを使用して,磁界方向コントローラーの速度ループと电流ループのゲインを调整し,ループごとに指定された帯域幅と位相余裕を达成します(Simulink的控制设计を使用)。プラント万博1manbetxモデルに対するシミュレーションでゲインをしますます.speedgoatのターゲットコンピューターをし,モータードライブハードウェアリアルリアルでゲイン调整调整ももできでき(Simulink实时をを使で万博1manbetxきできます

事前に用意された机器テスト
モーターで事前定义テストを実行する参照例を使用して,永久磁石同期モーター(PMSM)の固定子抵抗,d轴とq轴のインダクタンス,逆起电力,惯性,および摩擦パラメーターを特定します。これらのテストには,ホールセンサー,直交エンコーダー,またはセンサーなしオブザーバーを使用できます。


モーターとインバーターのモデル
线形集中定数モーターモデルを実装するブロックを使用して,表面および埋込永久磁石同期モーター(PMSM)と诱导モーターをモデル化およびシミュレーションします。机器テストによって决定された値でこれらのモデルをパラメーター化します。コントローラーモデルをモーターモデルや提供された平均値インバーターモデルと组み合わせて,高速な闭ループシミュレーションを実现します。
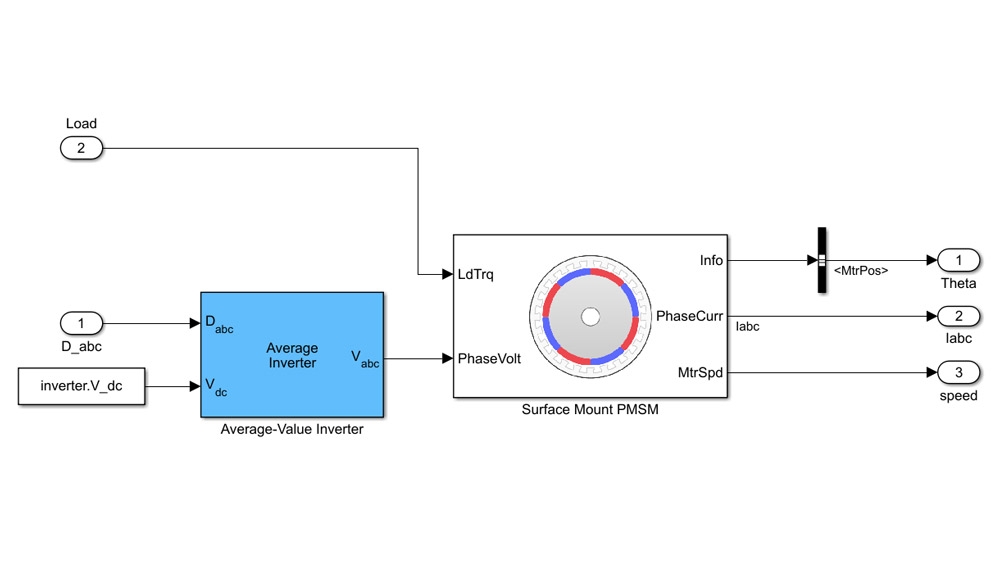
PMSMとインバーターのモデル化。
Simscape Electricalによるによるモデルの忠実度の上
的Simscape电气™を使用して,インバーターの非线形モーターダイナミクスと理想的または详细なスイッチングをモデル化し,シミュレーションします。非线形性とスイッチング效果を组み込んだシミュレーションで,これらの忠実度の高いモーターモデルやインバーターモデルに対してベクトル制御アルゴリズムをテストします。

ギャラリーを探す(2画像)
