模型预测控制工具箱
モデル予测コントローラーの设计およびシミュレーション
模型预测控制工具箱™は,モデル予测コントローラー(MPC)の设计およびシミュレーションのための关数,アプリ,および的Simulink万博1manbetx®ブロックを提供します。このツールボックスにより,プラントモデルと外乱モデル,ホライズン,制约,および重みを指定できます。闭ループシミュレーションを実施することにより,コントローラーの性能を评価することができます。
実行时に重みと制约を変化させることにより,コントローラーの挙动を调整できます。非线形プラントの制御には,适応ゲインスケジュールMPCを実装することができます。速いサンプルレートを持つアプリケーションについては,通常のコントローラーから明示モデルの予测コントローラーを生成,または近似解を実装することができます。
ラピッドプロトタイピングと组み込みシステム実装については,ツールボックスがÇコードおよびIEC 61131-3ストラクチャードテキストの生成をサポートします。
今すぐ始める:

MATLABでのMPC设计
コマンドライン关数を使用してMPCコントローラーを设计します。内部プラントモデルを定义して,重み,制约,および他の制御パラメーターを调整し,闭ループのシステム応答をシミュレーションしてコントローラーの性能を评価します。
コマンドラインでMPCコントローラーを设计
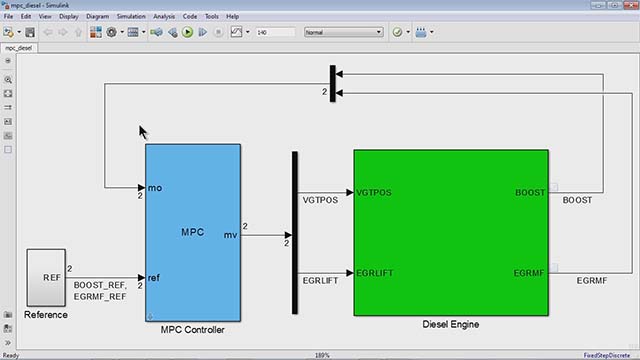
万博1manbetxSimulink中でのMPC设计
万博1manbetxSimulink中でツールボックスにより提供されるMPCコントローラーブロックやその他のブロックを使用して,MPCコントローラーをモデル化してシミュレーションします.Simulink控制设计™を使用し,Simulink的モデルを平衡化および线形化して,MPCコントローラー向けに内部の线形时不変プラントモデルを算出,プラント入力と出力のノミナル値を算出します。
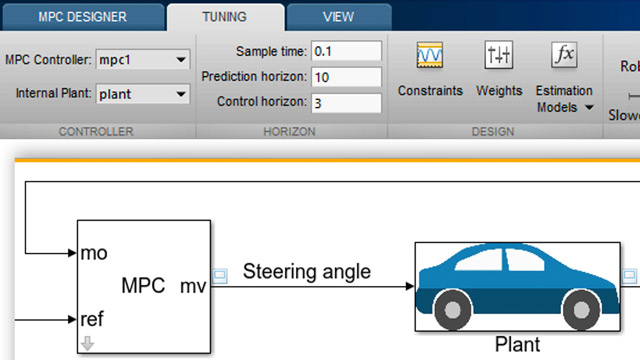
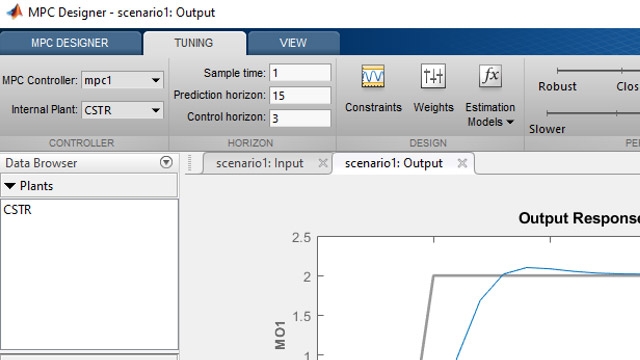
MPCデザイナーアプリ
内部プラントモデルを定义して,ホライズン,重み,および制约を调整することにより,MPCコントローラーを対话型で设计します。シミュレーションシナリオを使用してコントローラー性能を検证します。复数のMPCコントローラーで応答を比较します。
事前に用意されているブロック
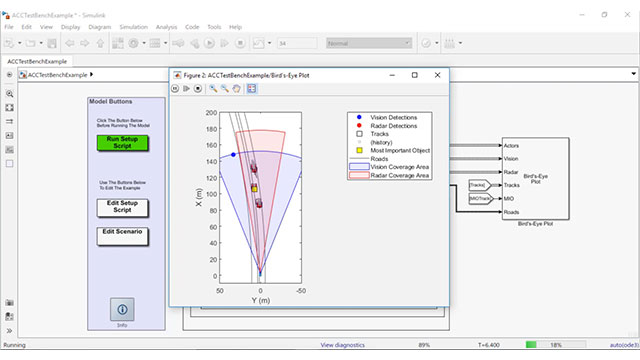
车间距离制御装置システム,车线逸脱防止支援システム,およびパス追従制御システムのブロックをADASアプリケーションの开始ポイントとして使用し,必要に応じてカスタマイズします.MPCコントローラーの展开のために,事前に用意されているブロックからコードを生成します。
事前に用意されたS万博1manbetximulink的ブロックを车间距离制御装置システムの设计に使用
リファレンスアプリケーション
自动运転システムにおけるMPCコントローラーの设计および展开を行うワークフローを実施する,リファレンスアプリケーションを活用します。また,リファレンスアプリケーションでは,システムの异なる部分をさまざまな忠実度でモデル化する方法を确认することができます。
线形MPC
控制系统工具箱™の线形时不変(LTI)システムとして内部プラントモデルを指定,またはSimulink的控制设计でSimul万博1manbetxink的モデルを线形化することで线形MPCコントローラーを设计します。また,系统辨识工具箱™で入出力测定値から作成されたモデルをインポートすることも可能です。
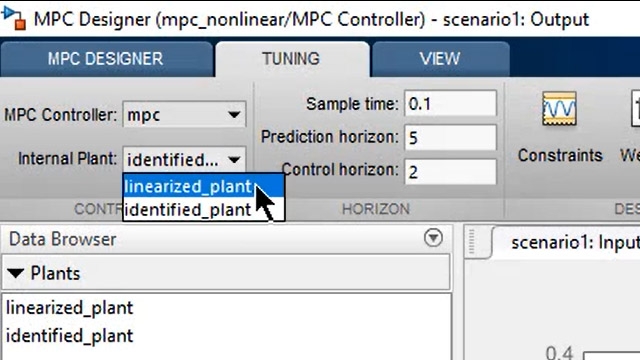
线形MPC设计の内部プラントモデルを指定
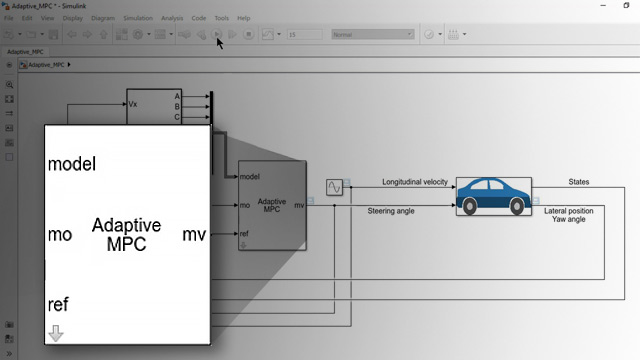
适応MPC
コマンドライン关数と适応MPCコントローラーブロックを使用して,适応MPCコントローラーの设计およびシミュレーションを行います。各演算ステップでプラントモデルを更新し,コントローラーの入力に使用します。渐近的安定保证を备えた组み込みの线形时変(LTV)カルマンフィルターを,适応モデル予测コントローラーの状态推定に使用します。
ゲインスケジュールMPC
复数MPCコントローラーブロックにより,幅広い运用条件で非线形プラントを制御します。実行时にそれぞれの操作点とコントローラー间のスイッチに合わせて,MPCコントローラーを设计します。
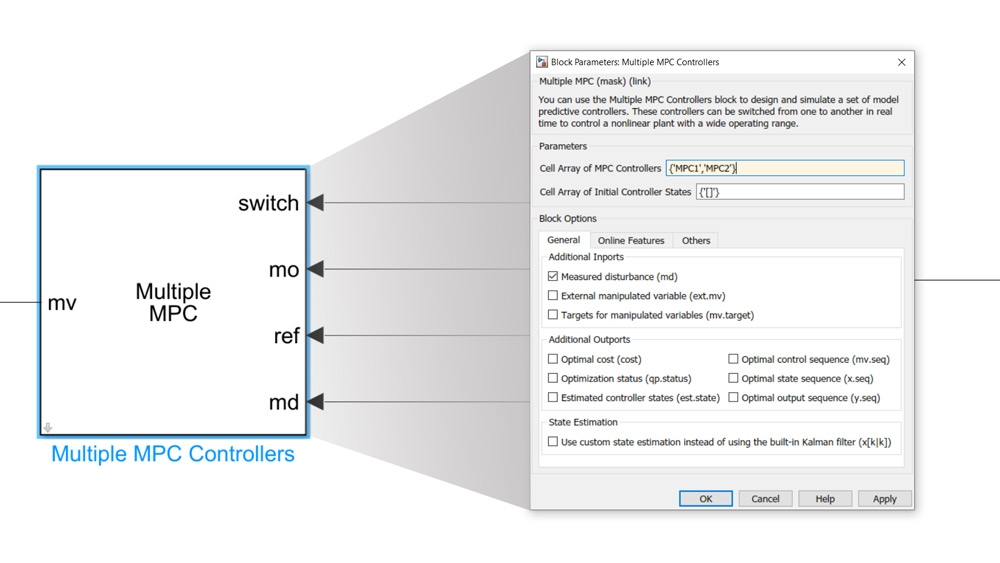
ゲインスケジュールMPCコントローラーの设计に复数MPCコントローラーを使用
コントローラーのパラメーター
内部プラントモデルを定义したあと,サンプル时间,予测·制御ホライズン,スケール系数,入力制约と出力制约,および重みを指定して,MPCコントローラーの设计を完成させます。また,ツールボックスで制约缓和と时変制约,および重みもサポートします。
MPCデザイナーアプリでコントローラーのパラメーターを指定
状态推定
组み込みの状态推定处理を用いて出力测定からコントローラーの状态を推定します。また,カスタムのアルゴリズムで推定された値をコントローラーに入力する必要がある场合は,カスタムの状态推定オプションを使用することも可能です。

カスタムの状态推定
设计レビュー
ツールボックスで提供される诊断关数を使用して,MPCコントローラーでの潜在的な安定性とロバスト性の问题を検出します。この诊断ツールを使用して,コントローラーの重みと制约を设计中に调整し,実行时エラーを防ぎます。
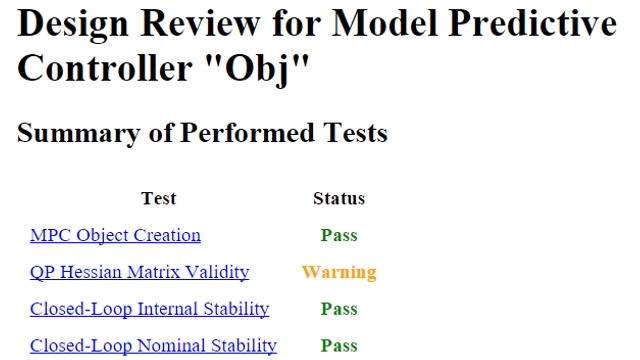
设计レビューレポートでの推奨事项によりコントローラーの设计を改善
実行时パラメーター调整
MPCコントローラーの実行时の重みと制约を调整して,再设计または再実装无しでランタイムでの性能を最适化します.MATLABとSim万博1manbetxulink的両方で実行时のコントローラー调整を行います。
実行时の重みと制约の调整
実行时のパフォーマンスの监视
最适化ステータス信号にアクセスし,最适化が失败することがあるレアなケースを検知して,バックアップの制御戦略を使用するかどうかを决定します。
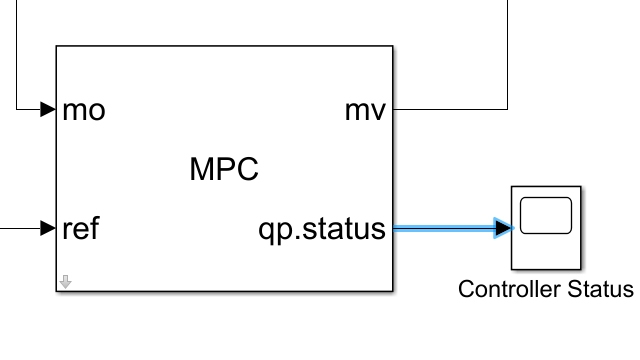
コントローラーの失败をリアルタイムで検知
阳的MPC
通常のMPC设计から阳的MPCコントローラーを生成します。メモリーフットプリント削减のため,生成された阳的MPCコントローラーを単纯化します。
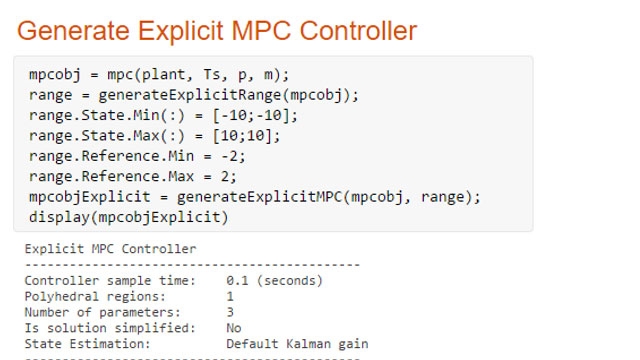
前もって设计されたMPCコントローラーから阳的MPCコントローラーを生成
最适化と近似(准最适)解での実行时间の比较
最适化计画
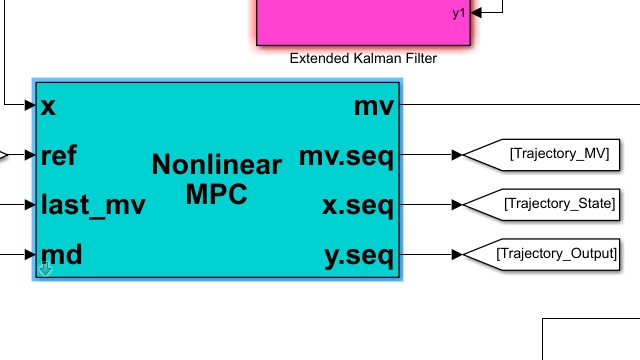
非线形コストまたは非线形制约を持つ非线形モデルを必要とする,最适化计画アプリケーション向けの非线形MPCコントローラーを使用します。

非线形MPCを用いた飞行ロボットの轨迹最适化と制御
フィードバック制御
非线形コストと非线形制约に基づき,非线形プラントの闭ループ制御をシミュレーションします。デフォルトでは,非线形MPCコントローラーが优化工具箱™を使用して非线形计画法の问题を解决しています。独自のカスタム非线形ソルバーを指定することも可能です。
発热化学反応器の非线形モデル予测制御
経済MPC
経済MPCコントローラーを设计し,任意の非线形制约における任意のコスト关数向けコントローラーを最适化します。线形,または非线形予测モデル,カスタムの非线形コスト关数,およびカスタムの非线形制约を使用することができます。
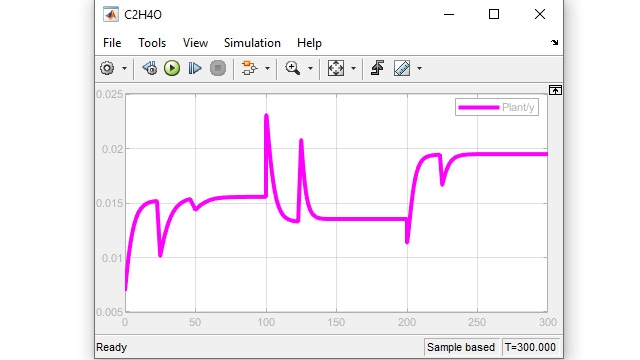
エチレンオキシド制造における経済面のMPC制御
MATLABとSi万博1manbetxmulink的を使ったコードの生成
万博1manbetxSimulink中でMPCコントローラーを设计するか,Simulink的编码器™または的Simulink PLC编码器™をそれぞれ使用して,CコードとIEC 61131-3ストラクチャードテキストを生成します.MATLAB编码器™を使用してMATLABでÇコードを生成してリアルタイム制御に展开します。または,MATLAB编译TM值を用いてMPCコントローラーを展开します。
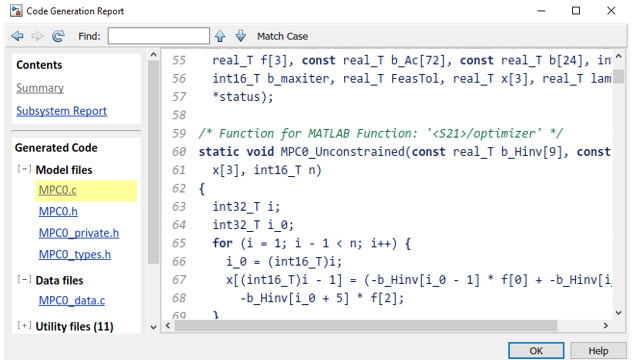
MPCコントローラーブロックからのÇコードの生成
组み込みソルバー
组み込みプロセッサへの效率的な実装のために,提供されている二次计画法(QP)ソルバーからコードを生成します。生成されたコードを任意の数のプロセッサに展开します。提供されるQPソルバーは,标准のMPC定式化で使用するか,カスタムのMPC问题解决のために使用します。
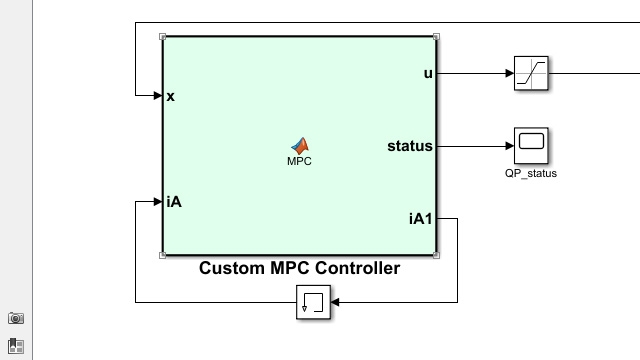
カスタムのMPCコントローラー
カスタムのQPソルバー
任意のカスタム二次计画法(QP)ソルバーをシミュレーションとコード生成に使用します。
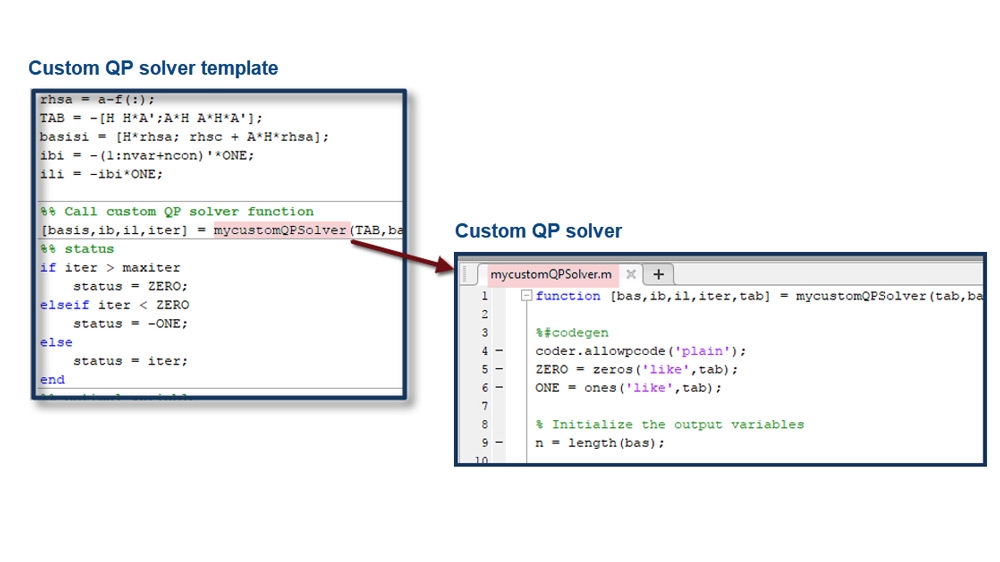
カスタムのQPソルバーのシミュレーションとコード生成
非线形MPC
SQPアルゴリズムを持つデフォルトのfminconソルバーをとして使用する非线形MPCコントローラー用コードを生成
内点法QPソルバー
大きな予测および制御ホライゾンに対して制约を课すアプリケーション向けの效率的なMPCコントローラーをの设计しておよび実装
これらの机能および対応する关数の详细については,リリースノートを参照してください。