传感器融合和跟踪工具箱
マルチセンサー追跡およびポジショニングシステムの設計,シミュレーション,テスト
传感器融合和跟踪工具箱™には,复数のセンサーからのデータを融合して状况认识や位置推定を维持するシステムの设计やシミュレーション,テストを行うためのアルゴリズムやツールが付属しています。参照例を元にして,监视および自律システム(空中,宇宙,地上,船上,水中のシステムなど)向けにマルチオブジェクト追迹やセンサーフュージョン开発を行うことができます。
アクティブ/パッシブレーダー,ソナー,激光雷达,EO / IR, IMU, GPSといった実際のセンサーのデータを融合することができます。また,仮想センサーから合成データを生成して,さまざまなシナリオでアルゴリズムをテストすることもできます。このツールボックスには,グリッドレベルおよび検出レベルと,オブジェクトレベルまたはトラックレベルの融合を組み合わせたアーキテクチャを評価するためのマルチオブジェクトトラッカーおよび推定フィルターが含まれています。また,グラウンドトゥルースシーンに対するパフォーマンスを検証するためのメトリクス(OSPA, GOSPAなど)も用意されています。
このツールボックスは,シミュレーション高速化やラピッドプロトタイピング向けのCコード生成をサポートしています。
详细を见る:


空域监视
レーダーads - b, EO / IRセンサーなどのアクティブセンサーやパッシブセンサーからのデータを使用して,複数のオブジェクトを追跡します。操縦対象物に対応できるようにトラッカーをカスタマイズします。

地球を中心としたシナリオによって,航空機を追跡。
宇宙監視
レーダーセンサーからのデータを使用して,複数の宇宙飛行物体を追跡し,宇宙状況認識を生成します。トラッカーで,ケプラー運動モデルや他の軌道モデルを使用するよう設定することができます。

ケプラー运动モデルを使用してスペースデブリを追迹。
地上監視と海洋監視
高解像度レーダーと激光雷达センサーを使用して,地上および海洋アプリケーションの拡張オブジェクトを追跡します。
単一センサー追跡
スマートセンサーで必要になる処理を実行するために,マルチオブジェクトトラッカーをモデル化してシミュレーションします。たとえば,生データをオブジェクトのトラックリストに変換します。
集中型フュージョン
复数のセンサーやセンサーモダリティからのデータを融合した集中型トラッカーを使用して,拡张オブジェクトを追迹します。确率仮说密度(PHD)トラッカーを使用して,移动オブジェクトの运动学と,オブジェクトの次元および方向を推定します。复雑な都市环境では,グリッドベースのランダム有限集合(RFS)トラッカーを実装して,各グリッドセルの占有率とその运动学を追迹します。
トラックレベルフュージョン
環境をより包括的に推定できるように,複数の追跡源からのトラックを融合します。帯域幅制約のあるシステムや,陳腐化した結果を取り除くために流言制御を採用したシステムのトラック間フュージョンのアーキテクチャを評価します。
推定フィルターとデータ関連付け
線形/非線形のカルマンフィルター,マルチモデルフィルター,粒子フィルターなどの推定フィルターの豊富なライブラリを使用して,オブジェクトの状態を推定します。2 d割り当て問題や瓣割り当て問題に対する最適解またはk-bestな最適解を求めます。検出を検出,検出をトラック,トラックをトラックに割り当てます。
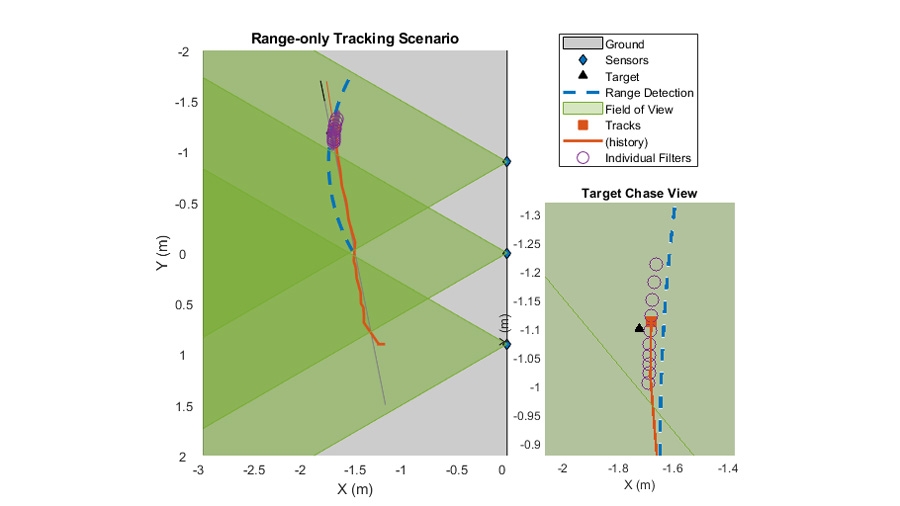
非ガウスフィルターを使ったレンジのみの追迹。
マルチオブジェクトトラッカー
推定フィルター,割り当てアルゴリズム,トラック管理ロジックをマルチオブジェクトトラッカーに统合し,検出をトラックに融合します。センサーデータを検出形式に変换し,シンプルなシナリオにはグローバル最近傍(GNN)トラッカーを使用します。测定の暧昧さが存在する密接ターゲットの追迹など,难易度の高いシナリオでは,同时确率データ结合トラッカー(JPDA),多重仮说トラッカー(MHT),またはPHDトラッカーに简単に切り替えることができます。
拡張オブジェクトとグリッドベースのトラッカー
博士トラッカーを使用して,拡張オブジェクトの運動学,サイズ,方向を追跡します。激光雷达やレーダー点群などの高解像度センサーデータを使用して,グリッドベースのRFSトラッカーで追跡し,複雑な都市環境におけるグリッドセルの動的特性を推定します。
トラックレベルフュージョン
追跡センサーや他のトラック間フュージョンオブジェクトによって生成されたトラックを融合します。帯域幅に制約のあるシステムにおける分散型追跡システムの構築流言伝播を抑え,陳腐化したトラッカーの結果を削減します。
フュージョンのアーキテクチャ
トラッカーアーキテクチャについて詳しく調べ,トラック間フュージョンや中央レベルの追跡,ハイブリッド追跡アーキテクチャの間の設計トレードオフを評価します。静的(検出)フュージョンを使用して,红外やESM,バイスタティックレーダーなど,角度のみのセンサーやレンジのみのセンサーによる検出を組み合わせることができます。

分散型同期パッシブセンサーを使った追跡。
オブジェクトの轨迹と姿势の生成
跟踪方案设计アプリで対话的にシナリオを定义し,さまざまな参照フレーム内のオブジェクトの真の位置や速度,方向を定义して変换するMATLABスクリプトを生成します。

アクティブ/パッシブセンサーモデル
アクティブセンサー(レーダー,ソナー,激光雷达など)をモデル化して,オブジェクトの検出を生成します。方位角,高度,またはその両方において,机械的および电子的なスキャンをシミュレーションします。レーダー警报受信机(RWR),电子支援装置(ESM),パッシブソナー,赤外线センサーをモデル化し,追迹シナリオで使用するために角度のみの検出を生成します。エミッターとセンサーを搭载したマルチスタティックレーダーとソナーシステムをモデル化します。
モンテカルロシミュレーション:
さまざまなランダムノイズ値を使用して,モンテカルロシミュレーションを行います。グラウンドトゥルースとセンサーの构成に摂动を与えることで,テストのロバスト性が向上します。
INSセンサーモデル
惯性计测装置(IMU),GPS,高度计,およびINSセンサーをモデル化します。モデルの温度やノイズ特性などの环境パラメーターを调整して,実际の环境をエミュレートします。

IMUおよびGPSセンサーをモデル化して,惯性フュージョンアルゴリズムをテスト。
方向推定
加速度计と磁力计の测定値を融合して,电子コンパス(电子罗盘)をシミュレーションします。加速度计,ジャイロスコープ,磁力计の测定値を姿势方位基准装置(AHRS)フィルターと融合し,方向を推定します。
姿勢推定
惯性センサーおよびGPSを使用して,非ホロノーム方位拘束の有无による姿势を推定します.GPSを使用せずに姿势を决定するには,惯性センサーと,高度计またはビジュアルオドメトリを融合します。

IMUとカメラデータの融合によるビジュアル惯性オドメトリ。
シナリオの可視化
オブジェクトの方向や速度,グラウンドトゥルースの軌跡,センサーの測定値,トラックを3 dでプロットします。検出とトラックの不確実性をプロットします。過去の追跡痕でトラックIDを可視化します。

マルチプラットフォームシナリオのシアタープロット。
センサーおよび追迹メトリクス
トラックの长さ,トラックの途切れ,トラックIDのスワップなどの,トラック确立,维持,および削除のメトリクスを生成します。位置や速度,加速度,ヨーレートの二乘平均平方根误差(RMSE),または二乘平均正规化推定误差(ANEES)を使用して,トラックの正确性を推定します.OSPAとGOSPAメトリクスを统合して,性能を1つのスコアにまとめます。アラン分散を使用して,惯性センサーノイズを解析します。
フィルターとトラッカーの調整
割り当てしきい値やフィルター初期化関数と,確認および削除のしきい値など,マルチオブジェクトトラッカーのパラメーターを調整して,性能を最大限に高めます。異なるトラッカーやトラッカー構成間で結果を比較します。INSフィルターを自動調整して,ノイズパラメーターを最適化します。
コード生成
MATLAB编码器™を使用して,シミュレーションの高速化やデスクトッププロトタイピングのために,C / c++コードおよび墨西哥人コードを生成します。コスト計算のしきい値を適用して,割り当てコストの計算にかかる時間を短縮します。