多体仿真模型装配工作流程
史蒂夫•米勒,MathWorks
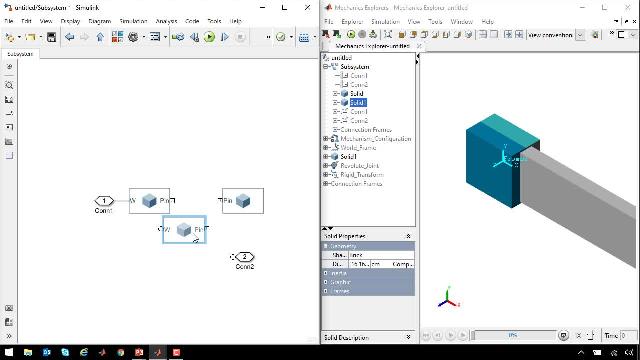
装配三维机械系统模型的工作流程包括用关节和约束将模型中的部件连接起来。关节的选择是基于各部分相对于其他部分的运动方式,这通常被称为它们的自由度。约束有时对于限制连接自由度的运动是必要的。Simscape™Multibody™提供了约束,允许您对系统进行建模,如啮合齿轮、云霄飞车和带滑轮的电缆驱动机构。你指定关节是如何使用信号来指定力或指定的运动。这些关节可以直接连接到电动、液压和其他物理领域的执行器模型。
产品集中
其他资源
相关视频和网络研讨会

















你也可以从以下列表中选择一个网站: