可调度组件允许您采用两种完全不同的建模样式:基于速率的建模和导出功能建模,将它们组合在一起,并将它们安排在同一个模型中,当您组合不同组件时,可以通过及早发现问题来帮助您节省时间。
这种造型风格给了你两大好处。这使您可以完全控制调度模型组件,而不是让Simulink调度组件。而且不需要处理组件之间的数据依赖性问题,因为只有数据传输。万博1manbetx
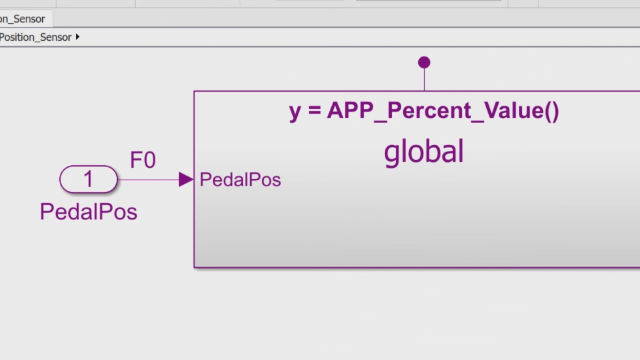
让我告诉你一个例子激励的调度组件的需求。在这个模型中,我们有两个不同的造型风格。在顶层,我们模拟踏板输入,进入节气门传感器和监控器模型块。传感器的数据将要节气门位置控制器和致动器模型块。该系统随后由节气门体作为植物的模型模拟。里面的节气门位置控制器和执行器模型块,有两个输出功能的组件 - 一个用于控制,另一个是执行器
内饰方面,节气门传感器和监控器模型块,还有的传感器和监控器基于速率的子系统。节气门位置传感器中小学,以及监视器 - 他们三人在5毫秒运行。加速踏板位置传感器 - 其中之一是在10毫秒运行。
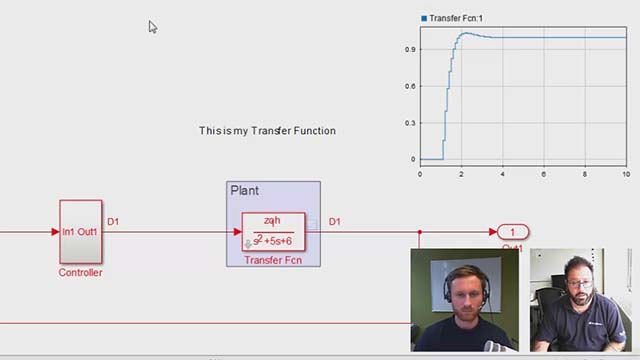
我想让控制器在传感器之前运行。我必须重新设计模型,以交叉安排这些不同建模样式的调度。为此,我可以配置油门传感器和监视器模型块,以通过定期事件端口调度模型的基于速率的组件。现在在油门传感器和监视器模型块内,所有子系统都由两个事件触发,这两个事件来自模型块外。它们被标记为D1和D2。
对于导出函数和可调度组件,不假设有内在的调度程序,允许您更灵活地集成到自定义环境中。
所以,我们可以使用计划编辑器在顶层调度两种类型的组件。在这种情况下,我们都交织的导出功能和调度组件两个通话。该ControllerRun5ms和ActuatorRun5ms事件控制节气门位置控制器和执行器模型块中的函数调用。D1和D2控制可调度组件。
但是我们希望首先按照执行顺序执行控制器,因此在本例中,我们只需将其拖放到希望其运行的位置。
当您从不同的地方获得具有不同建模风格的不同IP时,这种显式的组合调度和交织非常有用。