ROS网络设置
介绍
设置ROS网络可以在不同设备之间进行通信。这些参与者,或节点,全部注册罗斯主人分享信息。每个ROS网络只有一个独特的主人。每个节点通常是一个单独的设备,尽管一个设备可以运行多个节点。MATLAB®在现有ROS网络上进行通信时,是这些节点之一。
所有设备必须连接到相同的实际或虚拟网络,以使ROS连接工作。您可以在MATLAB中创建一个新的ROS Master,也可以连接到在其他设备上运行的现有ROS Master。如果您连接到外部主人,则必须知道设备的IP地址或主机名。最初的ROS主连接是通过调用来创建的石榴石。有关设置和使用ROS网络的更多信息,请参见网络连接和勘探。
节点通过使用称为发布者,订阅者和服务的实体发送消息来通信。发布者使用主题名称发送数据,然后订阅者通过网络接收。服务使用客户端从服务器请求信息。有关发送消息的更多信息,请参阅出版商和订户。
网络连接布局
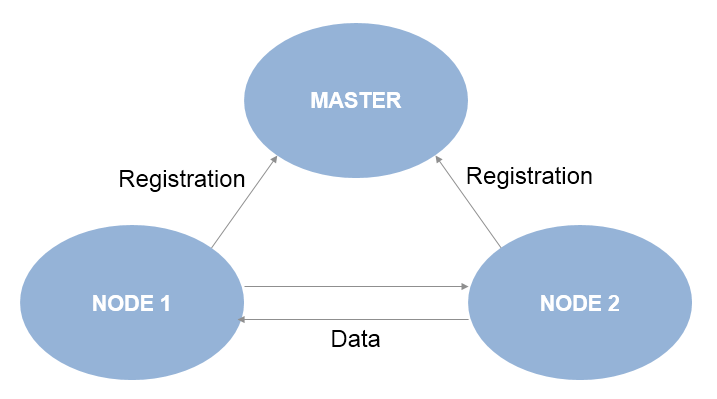
ROS网络是连接到ROS Master的节点的集合。根据您的应用程序和设备,节点的数量可能很大。与主人注册的节点可以与所有其他注册的节点进行通信。每个节点都会在ROS Master上注册不同的发布者,订户和服务,以在节点之间发送和接收信息。即使ROS网络中的所有节点均已在主体上注册,但直接在节点之间直接交换了数据。下图显示了带有两个ROS节点的ROS网络的布局。所有节点都必须具有双向连接才能在整个网络上共享数据。在设置过程中验证这些连接很重要。
每个节点都会注册自己的节点URI与主人。ROS网络中的其他参与者将使用此URI与节点联系。同样,ROS网络中的所有其他节点都必须达到此UI。要在MATLAB中创建一个节点,请致电石榴石。如果已经设置了ROS Master,则MATLAB检测并适当设置节点URI。否则,它既可以创建连接的ROS主和节点。
默认情况下,每个MATLAB实例都有一个全球的节点。该节点具有随机生成的名称,为其独特而分配。所有发布者,订户,服务客户端和服务服务器均在此全局节点上运行。
也可以看看
相关话题
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)