无刷直流电动机的串级PI控制器速度控制
这个例子展示了在Simulink中为现有的工厂调整PID控制器的几种方法之一。万博1manbetx在这里,您使用闭环PID自动调谐块在级联配置中调整两个PI控制器。自动调谐器阻止对被控对象的扰动,并根据被控对象在期望带宽附近的频率响应进行PID调谐。与开环PID自动调谐块相比,这里的反馈回路保持关闭,初始控制器增益在自动调谐过程中不改变。
无刷直流电机模型
这个例子中的模型使用了一个三相无刷直流电动机,加上一个降压变换器和一个三相逆变器电源链。buck变换器采用mosfet模型,而逆变器采用igbt模型,而不是理想的开关,因此器件的导通电阻和特性得到了恰当的描述。通过改变半导体门触发器,可以控制电机的速度,从而控制直流-直流转换环节和逆变器的电压。
mdl =“scdbldcspeedcontrol”;open_system (mdl)

电机模型参数如下:
p = 4;%极对数Rs = 0.1;%每相定子电阻[欧姆]Ls = 1的军医;%定子自电感/相,Ls [H]= 1 e-5女士;%定子互感,Ms [H]psim = 0.0175;%最大永磁体磁链[Wb]Jm = 0.0005;%转子惯性[Kg*m^2]Ts = 5 e-6;基本采样时间[s]Tsc = 1的军医;%内控回路采样时间[s]Vdc = 48;%直流链路最大电压[V]
该模型预先配置有两个级联PI控制器,一个用于内部直流链路电压环,一个用于外部电机速度环,具有稳定的闭环运行。
Kpw = 0.1;速度控制器的比例增益Kiw = 15;%用于速度控制器的积分增益千伏峰值= 0.1;%比例增益电压控制器Kiv = 0.5;%电压控制器积分器增益
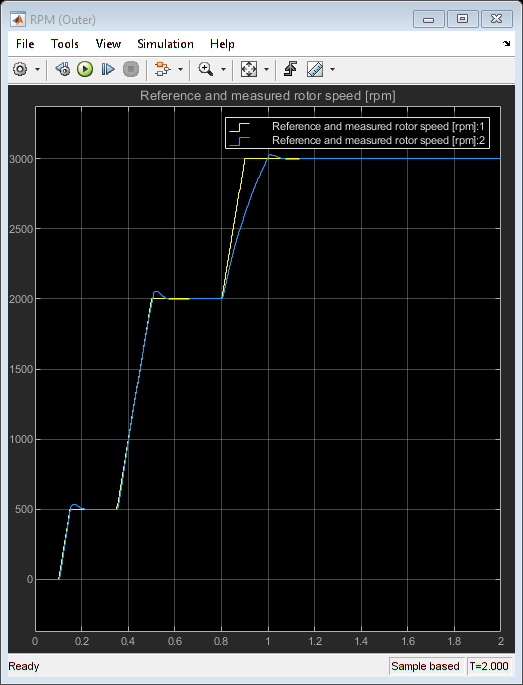
用于测试跟踪性能的信号是一系列的速度斜坡,从0-500 RPM, 500-2000 RPM,和2000-3000 RPM。对具有初始控制器增益的模型进行仿真,发现跟踪响应缓慢,需要对控制器进行重新校准。
open_system ([mdl' /可视化/ RPM(外部)]) sim (mdl)

配置闭环PID自动调谐块
在本例中,您使用闭环PID自动调谐块来改善控制器性能。在实验过程中,这些块通过闭环估计被控对象的频率响应,然后对控制器增益进行调整。检查控制子系统,看到闭环PID自动调谐块在自动调谐速度和自动调谐电压子系统。
open_system ([mdl' /控制”])

遵循典型的串级回路调谐实践,首先调谐内部电压回路与外部速度回路打开。然后,调整外部速度环与内部电压环关闭。
要指定PID控制器的调优要求,请使用调优选项卡的每个PID自动调谐器块。在这个例子中,控制器是并行的,离散的,PI控制器。控制器采样时间为100微秒。
一个目标阶段保证金为60度的两个控制器提供了良好的性能和鲁棒性之间的平衡。
对于外环控制器,选择a目标带宽100 rad /秒。对于内环控制器,选择估计的目标带宽为400 rad/sec。这些值确保了内环控制器比外环控制器有更快的响应。
闭环PID自整定器块执行闭环实验,以获得被试的频率响应。上指定此实验的参数实验选项卡的块参数。在这里,工厂签字是积极的,当设备达到新的稳定状态时,由于在标称工作点上设备输入的正变化导致设备输出的正变化。当植物是稳定的,就像在这个例子中,植物的符号等于它的直流增益的符号。
对于在自动调谐过程中注入的正弦波的振幅,使用1以确保装置在保持装置饱和极限的同时被适当地激发。如果你选择的振幅太小,自动调谐器块在电力电子电路中很难区分响应信号和纹波。
调优内环PI控制器
对于串级控制器,先建立电压内环的整定模型,再建立速度外环的整定模型。
为了使内环控制器的调优过程能够进行,在自动调优电压子系统中,将调优内环电压常数块值设置为1。设置此值将打开外部回路,并将内部回路配置为使用恒定标称参考电压12.5。
set_param ([mdl“/控制/调节内部电压回路”],“价值”,' 1 ')
同样,要禁用外部循环调优,将外部速度循环调优常量块值设置为0。
set_param ([mdl“/Control/Tune Outer Speed Loop”],“价值”,' 0 ')
这个设置使闭环PID自动调谐块被配置为运行闭环调谐实验从1到1.8秒的模拟时间。电站利用第一秒达到稳态运行条件。闭环实验持续时间的一个很好的估计是 ,在那里
,在那里 为目标带宽。你可以使用
为目标带宽。你可以使用% conv输出的闭环PID自整定块,以监控实验的进展,并停止时,实验% conv信号稳定在100%附近。
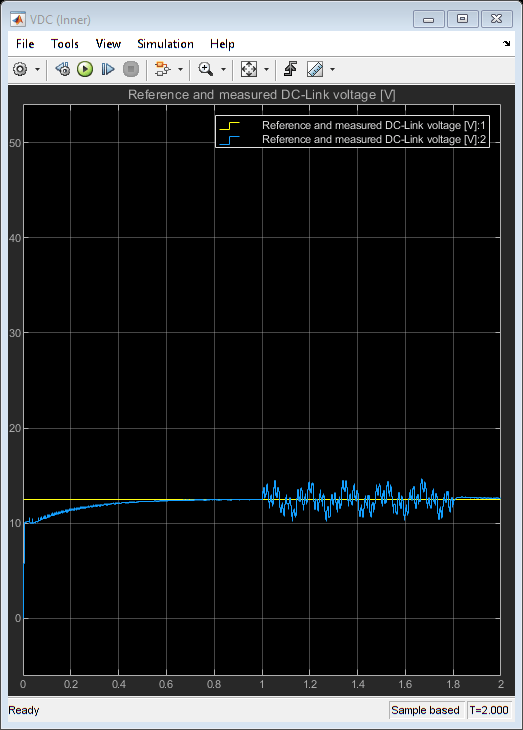
运行仿真。当实验结束时,闭环PID自整定模块返回内电压回路的调谐PID控制器增益。模型将它们作为数组发送到MATLAB工作空间VoltageLoopGains.
close_system ([mdl' /可视化/ RPM(外部)(mdl) open_system (' /可视化/直流(内部)]) sim (mdl)
用新增益更新内环PI控制器。
千伏峰值= VoltageLoopGains (1);Kiv = VoltageLoopGains (2);
外环PI控制器整定
接下来,调整外部速度循环。在自动调优电压子系统中,将调优内电压回路常数块值更改为0,这将禁用内电压回路调优。内环控制器使用新调整的增益,千伏峰值和Kiv.
set_param ([mdl“/控制/调节内部电压回路”],“价值”,' 0 ')
类似地,在Autotuning Speed子系统中,将Tune Outer Speed Loop常量块值更改为1,这将启用外部速度循环调优。对于这个循环,使用0.9秒的闭环自动调优持续时间,从1秒开始。调弦的名义速度是2000转/分。
set_param ([mdl“/Control/Tune Outer Speed Loop”],“价值”,' 1 ')
再次运行模拟。当实验结束时,闭环PID自整定模块返回外速度环的PID控制器增益。模型将它们作为数组发送到MATLAB工作空间SpeedLoopGains.
close_system ([mdl' /可视化/直流(内部)(mdl) open_system (' /可视化/ RPM(外部)]) sim (mdl)

用新增益更新外环PI控制器。
Kpw = SpeedLoopGains (1);Kiw = SpeedLoopGains (2);
改进的跟踪性能后,自动调整
若要检查调谐控制器性能,请在两个回路中禁用调谐。
set_param ([mdl“/控制/调节内部电压回路”],“价值”,' 0 '(mdl) set_param (“/Control/Tune Outer Speed Loop”],“价值”,' 0 ')
调整后的增益可以更好地跟踪测试斜坡信号。
sim (mdl)
另请参阅
相关的话题
你也可以从以下列表中选择一个网站: